Les robots humanoïdes : la prochaine révolution technologique ?
Points clés
Introduction
Théorie : des robots polyvalents pour repousser les limites de l’automatisation
Typologie : positionner les humanoïdes dans le spectre robotique
Intérêt par rapport aux robots traditionnels : la polyvalence comme principale proposition de valeur
Intérêt par rapport aux humains : dépasser les limites biologiques et éthiques
Usages : une potentielle révolution dans l’industrie, l’agriculture et même les services
État des lieux : la réalité se rapproche de la fiction sans l’égaler
Marché : une dynamique inédite dans la recherche et le développement de nouveaux prototypes
Maturité : des prototypes en phase de démonstration, encore limités à des usages spécifiques dans des environnements semi-structurés
Coût : des prototypes déjà compétitifs face à la main-d’œuvre humaine dans l’industrie
Prospective : des applications de niche à la société post-travail, un éventail de scénarios reste possible
Conclusion
Bibliographie
Résumé
Longtemps confinés à la science-fiction, les robots humanoïdes suscitent depuis quelques années un fort regain d’intérêt. Après des décennies de recherche et développement, les premiers modèles à usage commercial commencent à arriver sur le marché. En théorie, les robots humanoïdes pourraient entièrement révolutionner l’économie, fournissant une force de travail quasi illimitée pour un coût nettement inférieur à celui de la main-d’œuvre humaine, et combinant dans un même corps l’intelligence des esprits les plus brillants et la dextérité des meilleurs artisans. En pratique, les modèles actuels sont encore loin de se substituer parfaitement au travail humain.
Sur le plan physique, la reproduction de la dextérité humaine demeure un défi de taille et sur le plan cognitif, les intelligences artificielles manquent encore de sens commun. Ainsi, plusieurs scénarios peuvent être imaginés selon les évolutions technologiques et économiques : de robots cantonnés à quelques niches industrielles, sans impact macro-économique, à robots omniprésents dans l’économie, augurant une ère de prospérité sans précédent. L’ampleur et le calendrier de cette transformation restent largement indéterminés.
Guillaume Moukala Same,
Consultant économiste chez Asterès
Intelligence artificielle. Enjeux économiques et financiers d'une percée technologique
L’utérus artificiel et la reproduction humaine
L'intelligence artificielle en Chine : un état des lieux
L'intelligence artificielle : l'expertise partout accessible à tous
Relancer notre industrie par les robots (1) : les enjeux
Relancer notre industrie par les robots (2) : les stratégies
Contester les technosciences : leurs raisons
Contester les technosciences : leurs réseaux
Points clés
Longtemps confinés à la science-fiction, les robots humanoïdes entrent dans une phase industrielle marquée par une accélération des investissements, la multiplication des prototypes et les premières commercialisations. Les fabricants promettent de révolutionner l’économie mondiale en fournissant une main-d’œuvre quasi illimitée, polyvalente et peu coûteuse.
L’objectif de cette étude est d’évaluer la pertinence technologique et économique des robots humanoïdes de nouvelle génération et d’identifier les conditions de leur diffusion. L’étude procède en trois temps : un cadre théorique pour appréhender le rôle des humanoïdes dans une économie automatisée, un état des lieux du marché mondial et de la maturité technico-économique des prototypes, et une analyse prospective déclinée en six scénarios.
Théorie : la polyvalence comme principale proposition de valeur
La robotique humanoïde se distingue des autres formes de robotique par la combinaison inédite d’une autonomie élevée et d’une polyvalence quasi humaine. Là où les robots traditionnels sont conçus pour surpasser l’humain dans des tâches spécifiques, les humanoïdes ambitionnent de le remplacer dans l’ensemble de ses tâches manuelles. Par comparaison aux humains, les humanoïdes présentent quatre avantages potentiels : une production industrialisable et sans limite démographique, un coût potentiellement compétitif, une capacité de travail continu et en environnement hostile, et une montée en compétence instantanée par mise à jour logicielle. Les robots humanoïdes pourraient ainsi permettre de repousser les limites de l’automatisation, notamment dans les activités à forte intensité manuelle comme la production, la logistique, la construction, les soins et la maintenance.
État des lieux : une dynamique inédite mais une maturité technologique limitée
Le marché des humanoïdes connaît une accélération inédite depuis le début des années 2020. Les dépôts de brevets mentionnant le terme « humanoïde » ont crû de 71% par an depuis 2017, les investissements en capital-risque dans le monde occidental sont passés de quelques centaines de millions d’euros à plus de six milliards en quatre ans, et le nombre de prototypes recensés est passé de quelques unités en 2020 à une centaine en 2026. Les fabricants sont principalement américains (33% de l’échantillon étudié), chinois (28%) et européens (22%), avec quelques champions comme Neura Robotics en Allemagne ou Engineered Arts au Royaume-Uni. La majorité des modèles reste toutefois en phase de démonstration, seuls quelques-uns (Digit, G1, NEO) étant disponibles à la vente. La dextérité fine et la compréhension contextuelle demeurent des freins à l’adoption : les démonstrations publiques reposent souvent sur de la téléopération discrète ou un entraînement intensif sur des scénarios spécifiques.
Viabilité économique : des prototypes déjà compétitifs dans l’industrie
Le coût horaire estimé est très variable : de 207€/heure à moins de 1€/heure selon le coût d’acquisition, la durée de vie et le taux d’utilisation du robot. Dans les secteurs à flux continu (industrie, logistique, santé hospitalière), où le taux d’utilisation peut être maximisé, le coût horaire des humanoïdes est déjà inférieur à celui de la main-d’œuvre française, même avec un coût d’acquisition élevé (285.000€) et une durée de vie courte (3 ans). Les humanoïdes deviennent viables dans l’ensemble des secteurs à partir d’un coût d’acquisition de 150.000€ et une durée de vie de 6 ans — deux hypothèses qui semblent raisonnables pour un marché arrivé à maturité.
Prospective : six scénarios selon le coût et la capacité technologique
L’étude décrit six scénarios prospectifs articulés autour de deux facteurs :
le niveau technologique des robots humanoïdes (restreint ou général) et leur coût unitaire (faible, moyen, élevé) :
– Applications de niche : les robots manquent de polyvalence pour sortir d’un cadre prédéfini et leur coût reste supérieur à la main d’œuvre locale ;
– Luxe high-tech : leur coût reste assez élevé mais leur polyvalence les rend utiles dans de nombreuses tâches, notamment ménagères ;
– Passage à l’échelle : les robots sont plus abordables et permettent d’automatiser la production standardisée qui n’a pas été délocalisée ;
– Diffusion universelle : les robots, plus abordables, deviennent également utiles dans les services et sur les chantiers ;
– Réindustrialisation : les robots sont quasi gratuits et permettent la relocalisation de la production standardisée ;
– Société post-travail : quasi gratuits et aussi précis qu’un humain, les humanoïdes automatisent les tâches physiques qui restent après l’automatisation des tâches intellectuelles par l’intelligence artificielle générale.
Enjeu stratégique : un rendez-vous que l’Europe ne peut pas manquer
Bien qu’encore à un stade pré-commercial et soumise à des verrous techniques massifs, la robotique humanoïde pourrait devenir le catalyseur d’une nouvelle révolution industrielle, équivalente à celle de la machine à vapeur ou de l’informatique. La prochaine décennie ressemblera probablement davantage à un cycle de désillusion qu’à une révolution, à l’image de ce qu’ont connu les voitures autonomes. Mais rien n’indique que les verrous actuels soient indépassables, et le basculement, quand il se produira, récompensera ceux qui auront pris le pari tôt. Pour l’Europe, l’enjeu dépasse celui d’un retard technologique de plus : qui contrôle les humanoïdes contrôle la capacité même à produire. Investir sans délai dans la R&D, sécuriser les briques critiques de la chaîne de valeur et anticiper le cadre social et fiscal d’une économie au capital productif incarné constituent le ticket d’entrée pour le cycle qui comptera vraiment.
Derrière le verre dépoli de la porte se dresse la silhouette du robot humanoïde F.03 de Figure AI.
Nom de code : Bear Cave.
Introduction
« Dans cinq ans tous les prix vont baisser à zéro virgule un. Chers amis, dans cinq ans on va nager dans le blé et je ne sais pas dans quoi encore », annonçait Jacob Berman, personnage de la pièce de théâtre de science-fiction R.U.R., écrite par Karel Čapek en 1920. Cette œuvre, où apparut pour la première fois le terme « robot », relate l’ascension et la chute de la compagnie Rossum’s Universal Robots, qui conçoit et fabrique des automates physiquement et cognitivement indiscernables des humains, destinés à accomplir les travaux pénibles à leur place, augurant une ère d’abondance généralisée.
Longtemps resté du domaine de la science-fiction, ce scénario est, cent ans plus tard, remis au goût du jour par des entrepreneurs de la tech américaine, chinoise et européenne. Les « R.U.R » d’aujourd’hui s’appellent « Tesla », « Figure AI », « Unitree », ou encore « 1X », pour ne citer qu’eux. Ces entreprises reprennent à leur compte les mêmes promesses utopiques que celles formulées par le personnage fictif de Čapek. Elon Musk dépeint sans détour « un avenir d’abondance […] où il n’y a plus de pauvreté1 », Brett Adcock, fondateur de Figure AI, perçoit à l’horizon un monde où les robots ont aboli le travail indésirable et où « les prix tendent vers zéro », et Jensen Huang, CEO de Nvidia prédit que d’ici cent ans, « les robots humanoïdes seront aussi répandus que les voitures aujourd’hui2 ».
Mais qu’en est-il vraiment ? Au-delà des fantasmes alimentés par la science-fiction, la pertinence économique des robots humanoïdes n’est pas intuitive. Jusqu’à présent, l’automatisation des tâches physiques s’est appuyée sur des robots conçus non pas pour imiter l’être humain, mais pour le surpasser dans des tâches spécifiques, avec des performances inaccessibles à la morphologie humaine. Dès lors, pourquoi chercher aujourd’hui à reproduire ce corps humain que la robotique a historiquement cherché à dépasser, voire à rendre obsolète ? En outre, la conception de robots capables d’imiter à la fois les aptitudes physiques et cognitives des humains constitue un défi technologique et industriel d’une extrême complexité. Au-delà des effets d’annonce et des opérations marketing, où en sont réellement la technologie et son potentiel de déploiement commercial ? Comme l’a fait remarquer l’investisseur chinois Zhu Xiaohu, « chaque robot humanoïde est capable de faire un salto, mais où est la commercialisation ?3 ». Enfin, au-delà des robots ménagers, qui ne feraient que créer un marché de confort en libérant les tâches ménagères, les humanoïdes peuvent-ils vraiment révolutionner l’industrie et les services ?
L’objectif de cette étude est d’apporter de premières réponses à ces questions. La première partie pose un cadre théorique pour appréhender le rôle des robots humanoïdes dans une économie automatisée. La deuxième partie propose un premier état des lieux du marché, en analysant la dynamique du secteur, la typologie des fabricants et notamment la place des acteurs européens, et la maturité technico-économique des humanoïdes de nouvelle génération. Enfin, la troisième et dernière partie conclut sur six scénarios prospectifs de l’impact macro-économique des robots humanoïdes, selon les évolutions techniques et économiques.
Théorie : des robots polyvalents pour repousser les limites de l’automatisation
Typologie : positionner les humanoïdes dans le spectre robotique
Karel Čapek et al., R.U.R. : Rossum’s Universal Robots. Drame collectif en un prologue et trois actes, coll. Minos, Paris, La Différence, 2011.
N. G. Hockstein, C. G. Gourin, R. A. Faust et D. J. Terris, “A history of robots: from science fiction to surgical robotics”, Journal of Robotic Surgery, vol. 1, n° 2, mars 2007, p. 113-118 [en ligne].
Idem.
La notion de « robot », popularisée par la science-fiction, a considérablement évolué depuis ses origines littéraires. Loin de se limiter aux humanoïdes imaginés par Karel Čapek, le terme englobe aujourd’hui une vaste gamme de machines, du bras robotique industriel aux véhicules autonomes. Cette section explore les différentes facettes de la robotique en se basant sur deux critères fondamentaux, l’autonomie et la polyvalence, afin de mieux comprendre où se situent les robots humanoïdes dans ce paysage technologique en constante mutation.
Aux origines des « robots » : de la science-fiction à l’économie réelle
Le terme « robot », ou « robota » en tchèque, est un néologisme apparu pour la première fois en 1920 dans la pièce de théâtre R.U.R de Karel Čapek, qui signifie « corvée » ou « esclave »4. Dans l’œuvre de Čapek, les robots sont des machines humanoïdes dotées d’une intelligence rationnelle : humains en apparence, mais en apparence seulement car des qualités humaines telles que l’empathie sont perçues comme des entraves à l’efficacité.
Le terme sera ensuite popularisé par Isaac Asimov dans sa collection de nouvelles publiées entre 1938 et 19425, où apparaissent pour la première fois les trois lois de la robotique – Asimov démontre que ces trois lois, en apparence infaillibles, peuvent être contournées ou mises en échec. La robotique humanoïde deviendra à partir de là un thème récurrent dans la science-fiction, avec des figures amies de l’homme, comme Rosie dans Les Jetson ou C-3PO dans Star Wars, ou ennemies de l’homme comme Terminator personnage éponyme du célèbre film.
Les robots humanoïdes sont longtemps restés un objet de science-fiction. Le premier robot industriel de l’histoire, Unimate, introduit par General Motors en 19616, n’avait pas du tout une apparence humaine mais se présentait plutôt sous la forme d’un bras mécanique destiné à effectuer des tâches simples et répétitives sur les chaînes de production. Alors qu’à l’origine un « robot » désigne, dans la littérature de science-fiction, une machine à l’apparence humaine, le terme a évolué pour englober des réalités beaucoup plus variées.
Autonomie et polyvalence : vers une typologie des robots
Depuis Unimate, une grande variété de robots, aux apparences et aux fonctions très diverses, ont été développés, à tel point qu’en donner une définition unique constitue un vrai défi. Ce n’est pas le but ici. Le cadre analytique préféré est celui d’une matrice qui s’articule autour de deux caractéristiques fondamentales d’un robot : l’autonomie et la polyvalence. Cette typologie apparaîtra ensuite essentielle pour positionner les robots humanoïdes dans le large spectre de la robotique.
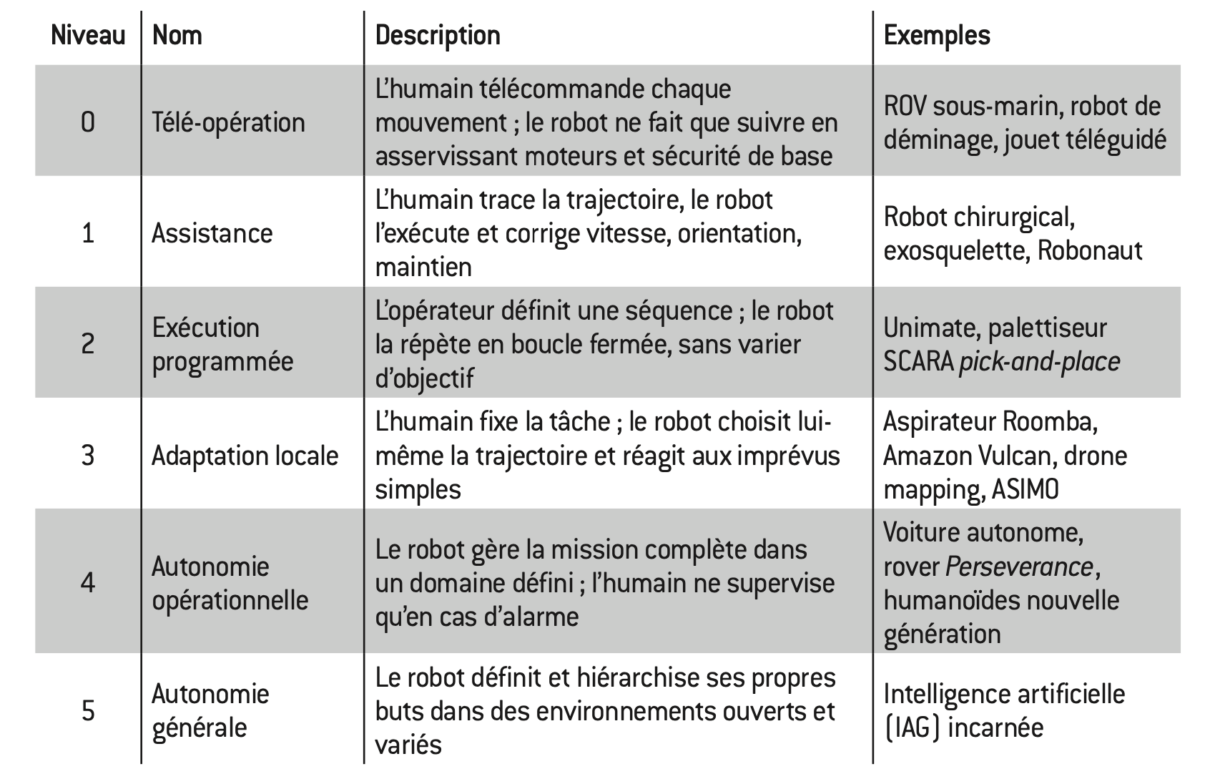
Le premier postulat de ce cadre conceptuel est qu’un robot se caractérise par une autonomie plus ou moins importante. L’autonomie est la capacité pour une machine à agir sans intervention humaine. L’autonomie n’est pas une notion binaire et peut être représentée sur un axe continu, avec comme degré zéro la télé-opération pure, lorsque l’humain commande à distance chaque mouvement, et comme degré le plus élevé, l’autonomie générale, lorsque le robot définit et hiérarchise ses propres buts. Les différents degrés d’autonomie peuvent ainsi être positionnés sur une échelle de 0 à 5, en fonction de la quantité de responsabilités réellement transférées à la machine. Cette échelle est présentée dans le tableau ci-dessous. Globalement, plus on monte dans les niveaux d’autonomie, plus le software (ou logiciel) du robot est avancé, jusqu’à atteindre l’intelligence artificielle générale.
Échelle d’autonomie des robots
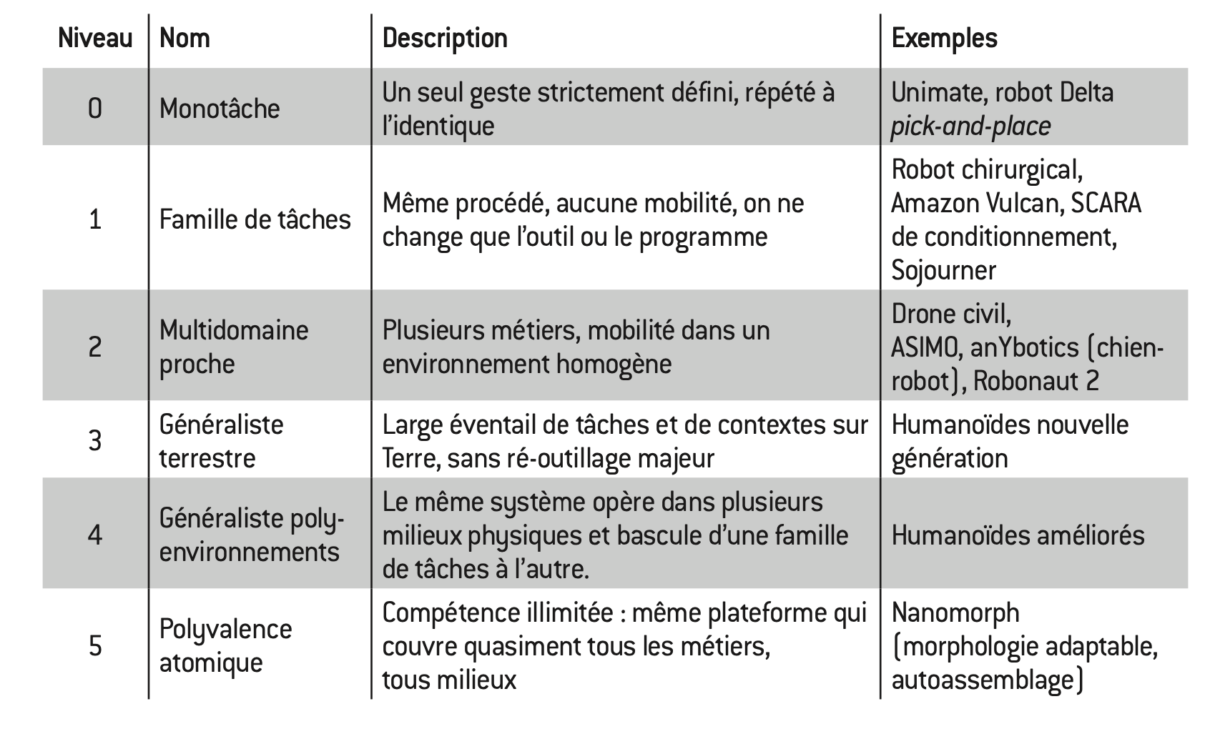
Le deuxième postulat de ce cadre conceptuel est qu’un robot se caractérise également par sa polyvalence plus ou moins importante – ou, pour le dire autrement, par son degré de spécialisation. La polyvalence est la capacité pour un robot à réaliser différentes tâches. La polyvalence est, comme l’autonomie, une question de degré et peut être représentée sur un axe continu allant de la monotâche à la compétence illimitée (encore très théorique). On peut également représenter la polyvalence sur une échelle allant de 0 à 5, comme le montre le tableau suivant.
Échelle de polyvalence des robots
Humanoïdes : une alliance unique d’autonomie et de polyvalence
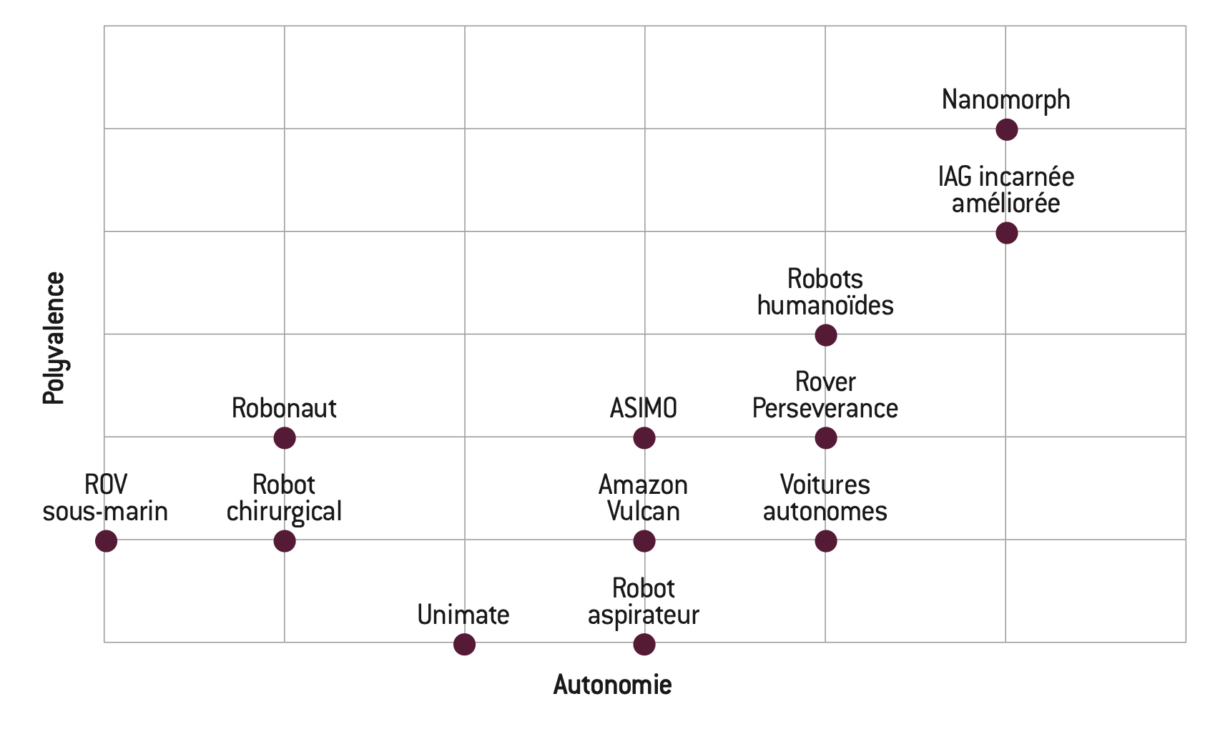
Chaque robot peut être ainsi positionné sur une matrice avec pour coordonnées l’autonomie (axe des abscisses = x) et la polyvalence (axe des ordonnées = y), présentée ci-après. Le premier robot industriel de l’histoire, par exemple Unimate, était programmé (x = 2) pour effectuer une tâche unique (y = 0). Les robots chirurgicaux sont commandés par un chirurgien et disposent d’une microautonomie en filtrant les tremblements, limitant les forces, empêchant les collisions (x = 1) et, s’ils ne répètent pas le même mouvement à la chaîne, l’éventail de tâches possibles reste très limité (y = 1). Les voitures autonomes en revanche disposent d’une autonomie accrue en ce qu’elles prennent des décisions dans un environnement incertain (x = 4) mais leur fonction se réduit à la conduite (y = 1).
Robonaut 2, le premier humanoïde testé sur la station spatiale internationale, pouvait enchaîner plusieurs tâches de maintenance (x = 2) mais était dirigé par un humain, les algorithmes ne faisant que stabiliser le pas (y = 1). Les robots humanoïdes de nouvelle génération promettent au moins le même niveau de polyvalence (y =3), avec une autonomie proche de celle d’un humain (x = 4). En théorie, les robots humanoïdes constituent donc à ce jour la forme robotique offrant simultanément les plus hauts degrés d’autonomie et de polyvalence. Il s’agit d’une rupture qualitative par rapport aux précédentes vagues d’automatisation : alors que jusqu’à présent les machines n’ont fait qu’automatiser des tâches isolées, la robotique humanoïde ambitionne d’automatiser le travail humain dans son ensemble.
Dans le futur, de nouveaux types de robots permettront peut-être d’aller encore plus loin. Sur le moyen terme, on peut imaginer une intelligence artificielle générale (IAG) disposant de la même autonomie qu’un humain (x = 5), incarnée dans un corps mécanique amélioré (y = 4), qui serait par exemple capable de voler. Sur le long terme, le stade ultime de la robotique est le « nanomorph », un robot composé de nanomachines intelligentes (x = 5) capables de prendre n’importe quelle forme pour s’adapter à leur environnement et à leurs objectifs (y = 5). Une telle perspective appartient encore au domaine de la science-fiction.
Exemples de robots et leur position sur la matrice autonomie – polyvalence
Intérêt par rapport aux robots traditionnels : la polyvalence comme principale proposition de valeur
Colin McGinn, Prehension: The Hand and the Emergence of Humanity, Cambridge (MA), The MIT Press, 2015, p. 3.
L’utilité économique des robots humanoïdes n’est pas nécessairement évidente ou intuitive. Leur conception complexe, coûteuse et fragile peut sembler superflue face à des machines spécialisées, plus simples et souvent plus efficaces. C’est la raison pour laquelle, jusqu’à récemment, l’automatisation a reposé entièrement sur des machines aux formes variées, mais pas humaines. Il apparaît évident sur la matrice présentée plus haut que les humanoïdes se distinguent de tous les autres types de robot par leur polyvalence : jusqu’à présent, seules des machines spécialisées dans un domaine assez restreint et capables de réaliser un nombre limité de tâches ont été inventées. L’argument développé dans cette sous-partie est simple : en imitant les aptitudes physiques et cognitives des humains, les humanoïdes, susceptibles d’accomplir une grande variété de tâches, avec une adaptabilité proche de celle des humains, aux côtés des humains, repoussent les limites de l’automatisation.
Les sources de la polyvalence : pourquoi reproduire le corps humain
La question de l’intérêt des robots humanoïdes par rapport à des robots spécialisés pourrait appeler une réponse simple et directe : si la forme humaine n’apportait aucune perspective d’avantages, les entreprises n’investiraient pas massivement dans le développement, alors même que ces robots ne sont pas encore capables d’accomplir la plupart des tâches humaines. Cela étant dit, il est possible d’aller plus loin en s’interrogeant sur quoi repose cet avantage compétitif. Et ici encore, la réponse tient en un mot : la polyvalence. Reproduire le niveau de polyvalence des humains constitue aujourd’hui l’un des principaux défis pour l’industrie.
La question de l’intérêt des robots humanoïdes par rapport à des robots spécialisés trouve une réponse évidente : les humains restent massivement employés dans l’économie, preuve qu’ils conservent un avantage compétitif certain. Cet avantage repose avant tout sur la polyvalence, et c’est précisément cette polyvalence que l’industrie robotique cherche aujourd’hui à reproduire.
Atteindre, pour un robot, la polyvalence de niveau 3 signifie pouvoir effectuer un large éventail de tâches dans des contextes variés sur Terre, sans nécessiter de réoutillage majeur. Deux aptitudes apparaissent indispensables pour atteindre ce haut degré de polyvalence : la mobilité et la dextérité avancée.
La mobilité est la capacité à se mouvoir d’un point A à un point B dans l’espace. La mobilité, tout comme l’autonomie et la polyvalence, est une question de degré. Certains robots sont ancrés aux sols (comme les robots chirurgicaux actuels), d’autres peuvent uniquement se mouvoir dans un environnement homogène (comme Agri-bot qui opère uniquement dans les champs), d’autres peuvent se déplacer quasiment partout dans un seul milieu physique (comme un drone), et les plus mobiles peuvent se déplacer dans plusieurs milieux physiques, voire tous. Le corps humain est une « machine » particulièrement mobile, capable de se déplacer quasiment partout sur Terre et, dans une moindre mesure, dans l’eau. Cette mobilité découle à la fois d’un corps particulièrement adapté à son environnement, fruit de millions d’années d’évolution, mais aussi d’un environnement particulièrement adapté à son corps, l’homme ayant façonné son environnement à son image.
La dextérité est l’autre pilier fondamental de la polyvalence du corps humain. Bien au-delà de la simple capacité à saisir un objet (la « préhension »), la dextérité est la capacité à effectuer des manipulations précises et complexes et est essentielle à l’interaction entre l’homme et son environnement. Comme Darwin l’a souligné dans The Descent of Man, « l’homme n’aurait pas pu atteindre sa position dominante actuelle dans le monde sans l’usage de ses mains qui sont si admirablement adaptées pour agir en obéissant à sa volonté7 ». C’est bien la limite de l’intelligence artificielle, dont les actions restent pour l’instant limitées au monde virtuel. In fine, la robotique humanoïde c’est permettre à l’IA d’agir sur le monde en la dotant d’un corps.
L’intérêt économique de la polyvalence : un arbitrage entre performance et flexibilité
La polyvalence comporte des avantages évidents sur le marché du travail. Une ressource polyvalente est une ressource qui peut être affectée à un très large éventail de tâches, selon les besoins du moment, offrant une certaine flexibilité. C’est une qualité particulièrement recherchée dans les environnements dynamiques, où les priorités peuvent évoluer rapidement et, de manière générale, quand le volume d’une tâche n’est pas suffisant pour y affecter une personne à plein temps. Mais la polyvalence a aussi un coût : à l’instar des généralistes qui disposent d’une compréhension globale de divers domaines plutôt qu’une expertise approfondie dans un seul, un robot humanoïde pourra effectuer une plus grande diversité de tâches, mais restera sans doute moins performant qu’un robot spécialisé pour effectuer certaines tâches précises.
Il existe donc un arbitrage entre performance et polyvalence et les robots humanoïdes s’imposeront seulement dans les cas où les bénéfices de la flexibilité l’emporteront sur les coûts. Dans le cas des transports par exemple, il est fort probable que les véhicules autonomes seront plus sûrs que des véhicules classiques conduits par des robots. Dans d’autres domaines, la réponse n’est pas si évidente a priori. Faut-il un robot spécialisé pour chaque tâche ménagère (cuisiner, passer l’aspirateur, tondre la pelouse, etc.), ou un robot humanoïde capable de s’adapter à la diversité et à l’imprévisibilité d’un environnement domestique ? De même, faut-il que les colis soient livrés par des robots humanoïdes bipèdes, ou vaut-il mieux confier cette tâche à des drones ou à des robots spécialisés conçus spécifiquement pour la livraison ? Il faudra sans doute du temps au marché pour réaliser ces arbitrages. La réponse à ces questions n’est pas figée dans le temps : de nouvelles innovations pourront rendre les humanoïdes obsolètes pour certaines tâches ou, inversement, les rendre plus performants pour accomplir de nouvelles tâches.
Intérêt par rapport aux humains : dépasser les limites biologiques et éthiques
Institut national de la statistique et des études économiques (Insee), « Coût horaire du travail selon l’activité. Données annuelles de 2008 à 2024 », [en ligne]. Les données détaillées par secteur n’étant pas disponibles pour 2024, le même écart avec la moyenne qu’en 2020 a été supposé.
Direction générale du Trésor, « Échanges bilatéraux entre la France et la Chine, 22 mars 2023 » [en ligne] ; Direction générale des douanes et droits indirects, « Résultats du commerce extérieur de la France pour l’année 2023 », 7 février 2024 [en ligne].
Javier Bilbao-Ubillos, Vicente Camino-Beldarrain, Gurutze Intxaurburu-Clemente et Eva Velasco-Balmaseda, “Industry 4.0, servitization, and reshoring: A systematic literature review”, European Research on Management and Business Economics, vol. 30, n° 1, 2024 [en ligne].
William J. Baumol et William G. Bowen, « On the Performing Arts: The anatomy of Their Economic Problems », The American Economic Review, vol. 55, n° 1/2, 1965, p. 495-502.
L’intérêt des humanoïdes par rapport aux robots classiques ayant été démontré, il reste maintenant à démontrer l’intérêt des humanoïdes par rapport aux humains. Quatre avantages potentiels ont été identifiés : la possibilité d’une production rapide et sans limite, un coût horaire potentiellement très faible, une meilleure performance globale, et une insensibilité à leur environnement. Tous ces avantages n’ont pas besoin d’être réunis pour que les robots trouvent leur place sur le marché, mais plus ils le sont, plus le travail humain devient obsolète dans les métiers manuels.
Industrialisation : vers une force de travail en quantité illimitée ?
Il n’existe que deux manières de produire de plus en plus vite : améliorer les méthodes de production (croissance intensive) ou augmenter la quantité des facteurs de production (croissance extensive). À compétences équivalentes, ce qui peut être réalisé en 10 ans avec 1000 personnes, peut être réalisé en 5 ans avec 2000 personnes. La disponibilité de la main-d’œuvre constitue donc un facteur limitant de la production, et il y aura toujours plus de projets potentiels que de main-d’œuvre disponible pour les mener à bien – le seul moyen est de les étaler dans le temps.
Si la main-d’œuvre qualifiée pouvait être produite de la même manière que des dizaines de millions de voitures sont produites chaque année dans le monde, celle-ci pourrait par exemple être affectée à la construction de centrales nucléaires, d’éoliennes, de panneaux photovoltaïques et accélérer la transition énergétique. C’est précisément ce que promettent les robots humanoïdes : produire de la main-d’œuvre à la demande, en quantité limitée uniquement par la disponibilité des matières premières, et à un rythme bien plus soutenu que celui nécessaire à la formation d’un être humain, qui demande plus de vingt ans entre la naissance et la fin des études supérieures.
Coût : vers une main-d’œuvre quasi gratuite ?
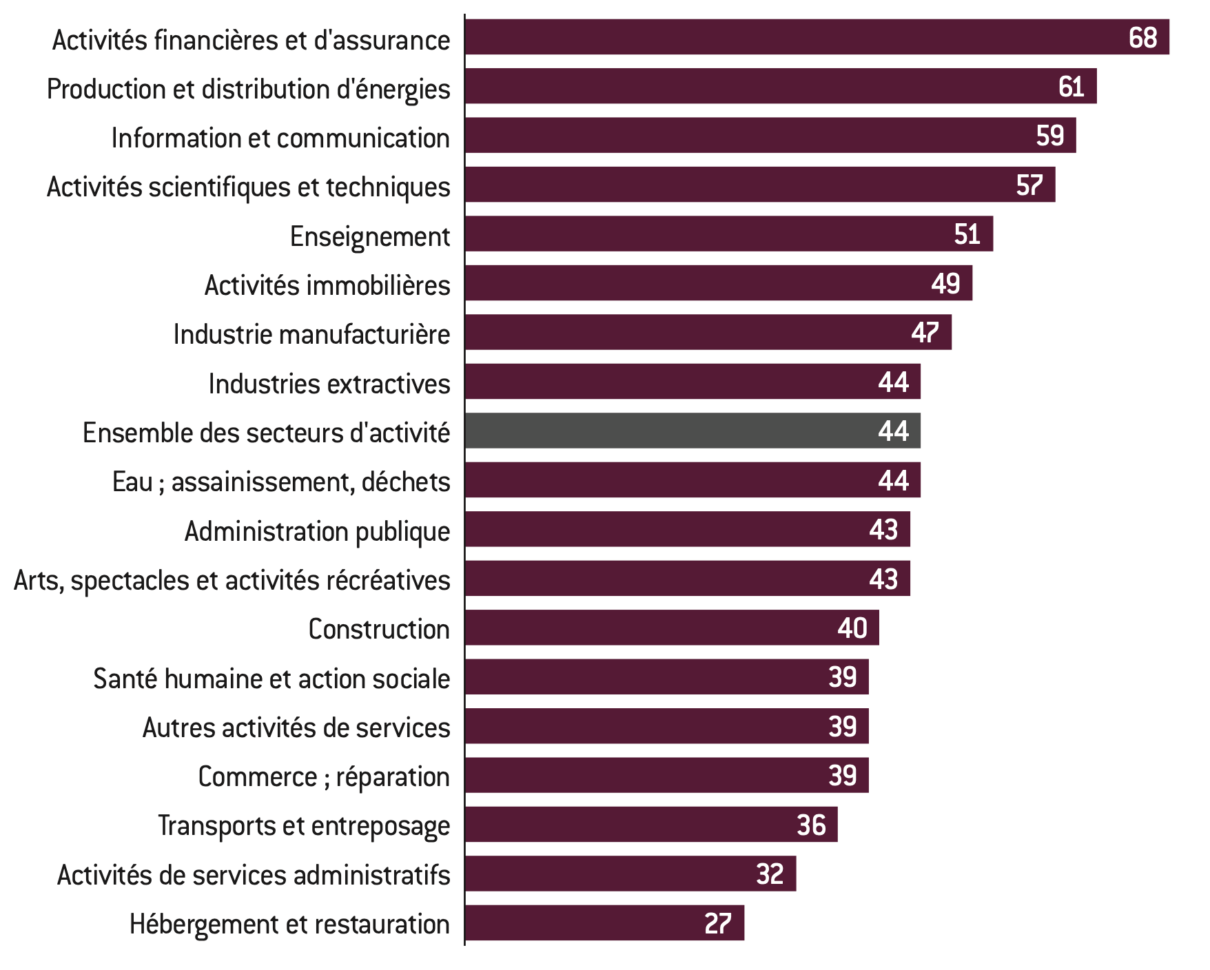
Contrairement au capital humain, le coût total de possession des robots diminue avec le temps : les coûts fixes (CAPEX) sont certes élevés, mais les coûts opérationnels (OPEX) sont faibles en l’absence de salaire à verser. Ainsi, en supposant des coûts de maintenance et d’énergie relativement faibles, le coût marginal du travail pourrait théoriquement tendre vers zéro avec une optimisation du capital de robots – durée de vie et taux d’utilisation suffisamment élevés. À titre de comparaison, en 2020, le coût horaire du travail était en moyenne de 44€ en France, avec d’importantes disparités selon les secteurs – de 27€ pour l’hébergement et la restauration à 68€ pour les activités financières et d’assurance8. En Chine, d’où proviennent environ 10% des importations françaises9, le coût horaire de la main-d’œuvre manufacturière reste nettement supérieur à zéro, à environ 8€10.
Une telle baisse des coûts de production affecterait autant l’industrie que les services. Dans l’industrie, l’introduction de robots humanoïdes pourrait rendre l’économie française compétitive face aux ateliers implantés partout dans le monde, permettant ainsi une relocalisation de la production, comme on l’observe déjà avec les robots classiques11. Dans les services, la substitution du capital physique au capital humain pourrait sonner le glas de la maladie des coûts de Baumol, selon laquelle les prix sont condamnés à augmenter pour maintenir des salaires compétitifs, malgré de faibles gains de productivité12.
Coût horaire de la main-d’œuvre selon le secteur d’activité en 2024 (estimation) (en euros).
Source :
Insee, calculs Asterès
Individuellement les robots sont limités par leur autonomie mais en se relayant ils peuvent théoriquement fournir une force de travail disponible 24h/24 et 7j/7.
Dares, Drees, DGAFP, Insee, Quelles étaient les conditions de travail en 2019, avant la crise sanitaire ? Dares analyses, n° 44, août 2021 [en ligne].
Kazunori Ohno, Shinji Kawatsuma, Takashi Okada, Eijiro Takeuchi, Kazuyuki Higashi et Satoshi Tadokoro, « Robotic control vehicle for measuring radiation in Fukushima Daiichi Nuclear Power Plant », Proceedings of the 2011 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Kyoto, Japon, novembre 2011, p. 38-43 [en ligne].
Performance : une polyvalence potentiellement sans limite
Si la nature fait bien les choses et que l’on peut s’en inspirer, elle ne doit pas pour autant limiter l’imagination. Dans le cas de la robotique humanoïde, le but n’est pas uniquement d’imiter les aptitudes humaines, mais dans certains domaines, de les améliorer. Sur le plan cognitif par exemple, les IA incarnées sont dotées d’un savoir encyclopédique et d’une capacité de raisonnement à la hauteur des esprits les plus brillants. Sur le plan de la vision, les humanoïdes sont équipés de capteurs qui leur confèrent des aptitudes surhumaines (vision multispectrale, microthermique, élargie, capteurs chimiques), leur permettant par exemple de percevoir des défauts ou des fuites à l’« œil nu ». Sur le plan de la communication, les robots sont tous connectés à un même réseau, leur permettant d’échanger instantanément des informations à distance et de coordonner leurs efforts collectifs de manière bien plus efficace qu’un groupe d’êtres humains. En termes de formation, les humanoïdes peuvent acquérir de nouvelles compétences de manière instantanée, au biais d’une simple mise à jour logicielle. Tout cela sans compter que les humanoïdes peuvent collectivement assurer un service continu 24h/24 et 7j/713.
Tous ces avantages, dont la liste n’est pas exhaustive, confèrent aux humanoïdes une polyvalence, une adaptabilité et une efficacité sur le papier bien supérieure à celles des humains. À terme, la robotique humanoïde pourrait évoluer vers un « travailleur universel » qui passerait naturellement du métier de mécanicien à ingénieur, ou encore à cuisinier. Dans les secteurs impliquant peu d’interactions robots-humains, les ingénieurs pourraient même s’émanciper de certaines contraintes du corps humain, par exemple en dotant les robots de deux paires de bras plutôt que d’une seule. Après tout, l’évolution n’est pas figée et une morphologie encore plus optimale pour agir sur le monde que celle du corps humain pourrait être inventée.
Sécurité : protéger la vie humaine
Les robots sont bien moins sensibles à leur environnement que l’homme : ils ne craignent pas les radiations et la pollution et sont plus résistants à la chaleur. Les humanoïdes peuvent ainsi prendre en charge des tâches dans des milieux hostiles ou à risque sanitaire, tels que les fonderies, les centrales nucléaires, les laboratoires chimiques ou les chantiers très poussiéreux, et contribuer à abolir les travaux dangereux – pour rappel, en France, près de 30% des salariés déclarent encore être exposés à des fumées, poussières ou produits dangereux14.
En outre, la « valeur humaine » n’étant pas en jeu, un incident n’emporte pas les mêmes conséquences éthiques : une maintenance ou, au pire, une perte financière, mais pas une blessure ou une vie perdue. Cette logique s’applique depuis longtemps dans les environnements à haut risque, comme lors de la catastrophe nucléaire de Fukushima, où des robots téléopérés ont été envoyés à la place des équipes humaines pour inspecter les réacteurs et limiter l’exposition aux radiations15. À l’avenir, des robots humanoïdes pourraient être envoyés dans l’espace pour réaliser des missions extravéhiculaires en complète autonomie, dans le vide intersidéral, sur la Lune ou sur Mars.
Usages : une potentielle révolution dans l’industrie, l’agriculture et même les services
Joseph Alois Schumpeter et al., Capitalisme, socialisme et démocratie, Petite biblio Payot 1235, Payot et Rivages, 2023.
Dans la classification de ROME, un « enjeu » est un regroupement de compétences ou de finalités professionnelles autour de grandes thématiques, quel que soit le secteur d’activité.
À travers l’histoire, chaque fois qu’une nouvelle méthode de production s’est révélée plus performante, plus rapide, moins coûteuse et plus sûre, elle a fini par supplanter celle qui la précédait. C’est le principe de « destruction créatrice » théorisé par l’économiste Joseph Schumpeter16. La différence cette fois est que c’est le travail humain qui est ciblé, et dans sa globalité. Estimer le nombre d’emplois menacés n’est pas chose aisée et cette partie de l’étude ne s’y risquera pas. Elle se contente de décrire les types de tâches et de missions que les robots humanoïdes pourraient prendre en charge, afin d’identifier les secteurs les plus exposés et de mettre en lumière les limites et les spécificités qui conditionneront leur déploiement effectif.
Cartographie du travail manuel : identifier les secteurs les plus exposés à l’automatisation par les humanoïdes
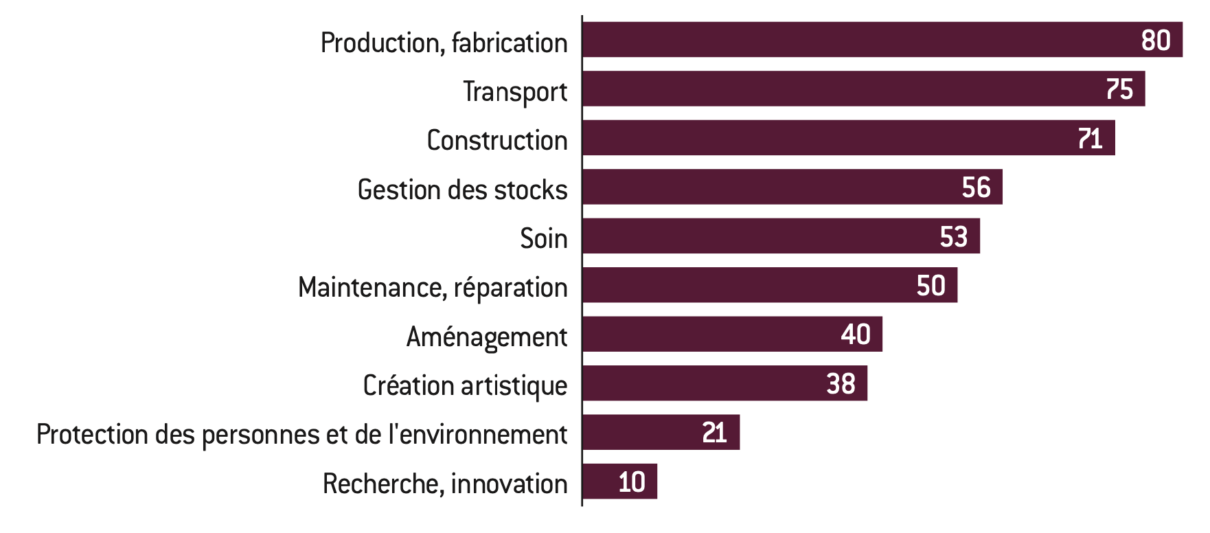
Bien que l’économie française soit principalement une économie de services, de nombreux métiers nécessitent encore la réalisation de tâches manuelles. À partir des fiches métier du répertoire ROME (Répertoire Opérationnel des Métiers et des Emplois) de la Dares, il est possible d’estimer l’importance du travail manuel pour plusieurs « enjeux » professionnels17. Pour ce faire, chaque macro-compétence a été classée comme « intellectuelle » ou « manuelle » à l’aide de ChatGPT o1, et un indicateur du caractère manuel de chaque enjeu a été défini en fonction de la proportion de compétences manuelles qu’il regroupe.
Sur 31 enjeux, seulement 11, soit un tiers, impliquent une part de travail manuel. Les enjeux les plus manuels, et donc susceptibles d’être automatisés par les humanoïdes, sont la production et la fabrication (80% des compétences répertoriées sont manuelles), le transport (75%) et la construction (71%). Parmi les activités non industrielles, le soin arrive en cinquième position (53%) et la création artistique en huitième position (38%).
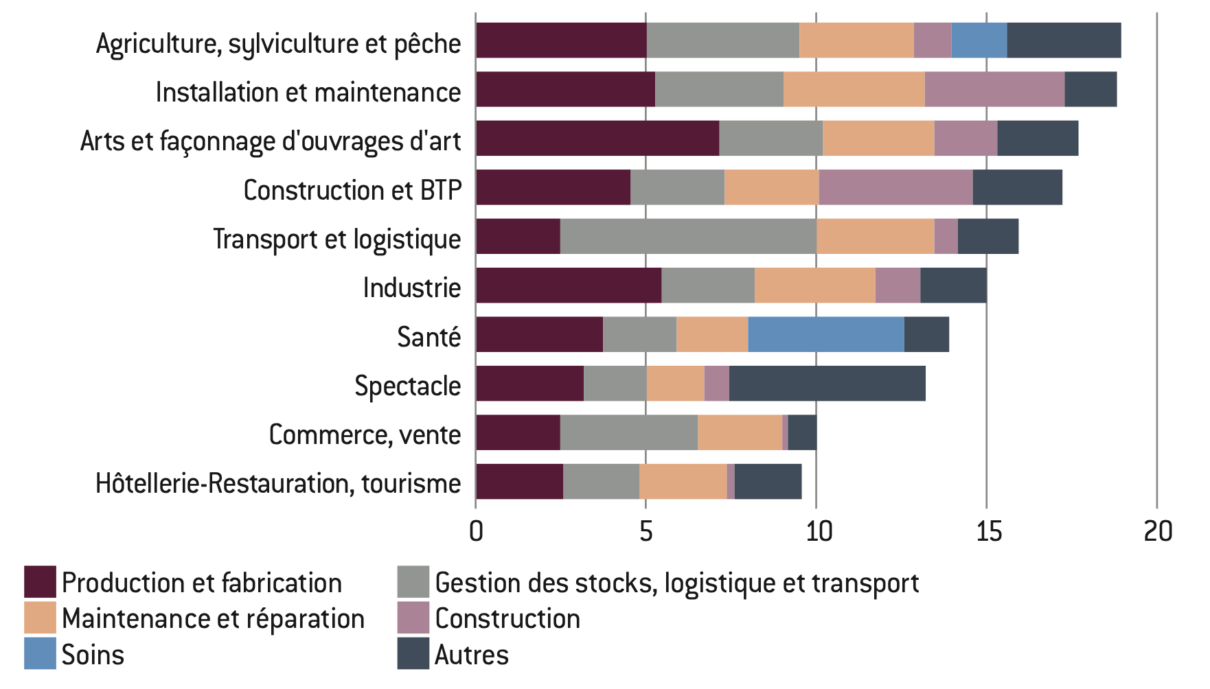
Ces enjeux peuvent ensuite être croisés avec les secteurs pour obtenir un indicateur sectoriel. Les trois secteurs les plus manuels se révèlent être l’agriculture (19% des compétences requises sont manuelles), l’installation et maintenance (19%), et les arts (18%). Au sein des activités de services, c’est le secteur de la santé qui arrive en tête (14% des compétences répertoriées sont manuelles), devant le spectacle (13%) et la vente (10%).
Ce qui ressort de cette analyse est que, pour la majorité, les tâches à robotiser varient peu d’un secteur à l’autre : ce sont principalement les activités de production et fabrication, de gestion des stocks et transport, et de maintenance et réparation. Ces trois grands enjeux sont communs à tous les secteurs manuels et représentent, dans chaque secteur, au moins 50% de l’ensemble des grands enjeux manuels. À noter que certains secteurs se distinguent par des tâches spécifiques, exercées presque exclusivement en leur sein, comme les soins dans le domaine de la santé ou la création artistique dans le secteur du spectacle.
Cette analyse comporte toutefois deux limites majeures. Premièrement, le volume horaire n’est pas pris en compte : les tâches physiques peuvent être minoritaires en nombre, mais majoritaires en volume horaire. Deuxièmement, toutes les tâches ne présentent pas le même niveau de complexité, même au sein d’un même type d’enjeu. Par exemple, la fabrication dans les métiers d’art demande sans doute une dextérité bien plus poussée que dans l’industrie. De même, la gestion des stocks dans la logistique est probablement plus répétitive et standardisée que dans le secteur de la santé.
Top 10 des « enjeux » à la plus forte proportion de compétences manuelles, selon le ROME
Source :
Note : pour chaque enjeu, part des macro-compétences répertoriées par la base ROME à dominante « manuelle », en opposition à « intellectuelle ».
Top 10 des secteurs à la plus forte proportion d’enjeux manuels
Source :
Note : pour chaque secteur, part des macro-compétences répertoriées par la base ROME à dominante « manuelle », en opposition à « intellectuelle ».
Si l’on assimile les enjeux à des tâches relativement homogènes.
Matrice des opportunités : anticiper les secteurs d’automatisation prioritaires
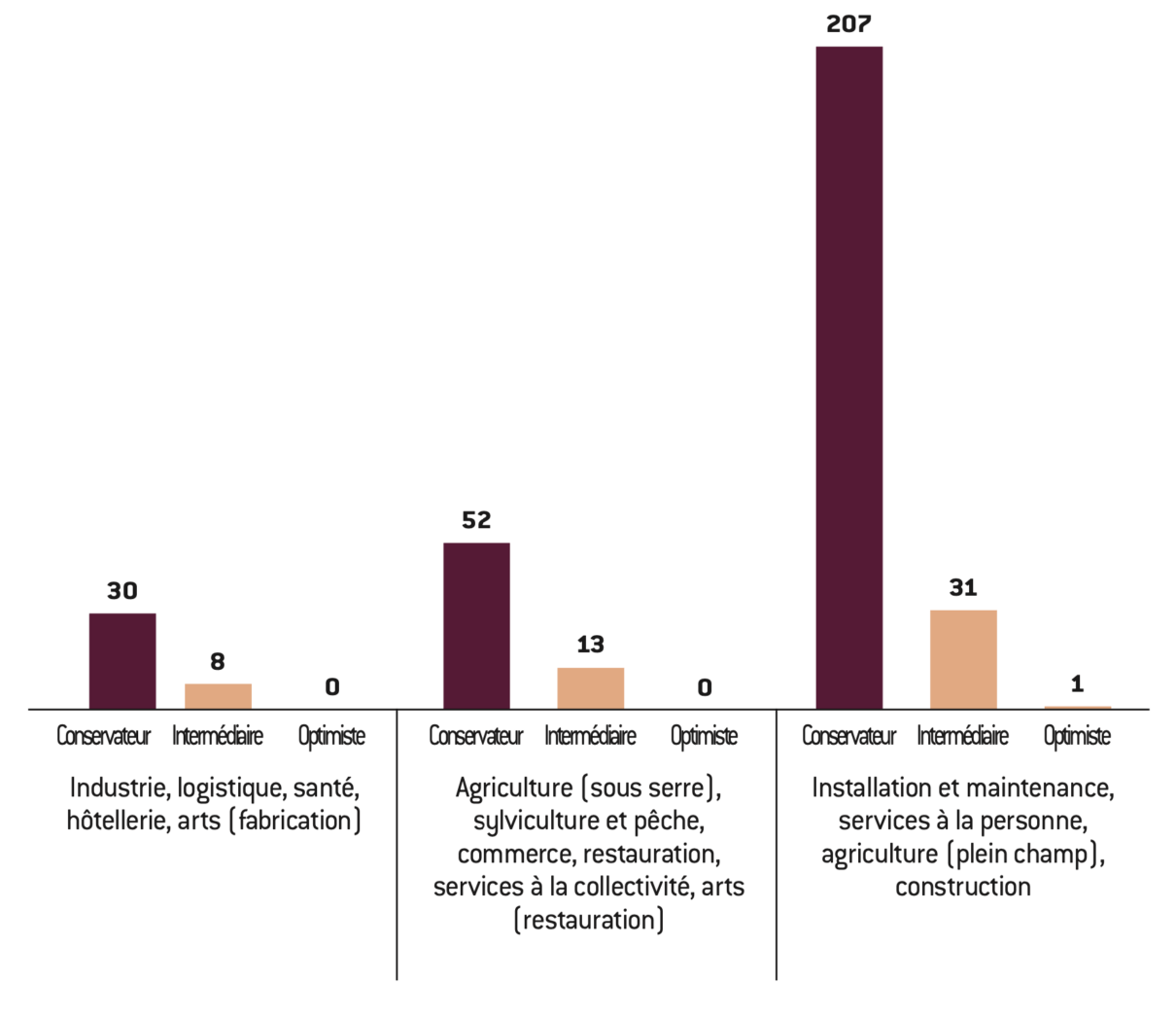
Si les tâches à automatiser sont globalement similaires d’un secteur à l’autre18, à quelques exceptions près, l’environnement dans lequel ces tâches sont exécutées et leur volume diffèrent. Ces deux facteurs conditionnent la viabilité commerciale des robots.
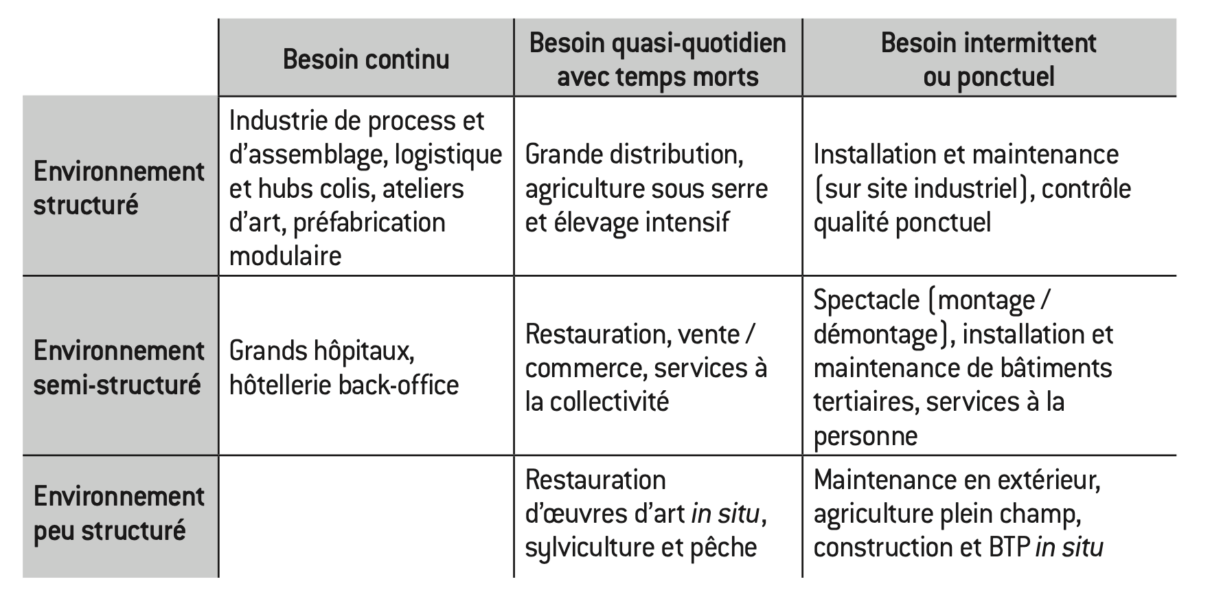
Premièrement, l’environnement détermine la difficulté de navigation : plus l’environnement est structuré, plus la robotisation est simple ; à l’inverse, plus l’environnement est chaotique, plus il faut de perception, d’adaptabilité et d’agilité mécanique. Trois types d’environnements sont distingués. Dans les environnements structurés, la machine dicte le lieu : l’espace est conçu ou réaménagé pour la machine (géométrie fixe, surfaces planes, flux matériels guidés, points de repère permanents). C’est typiquement le cas des usines d’assemblage, des entrepôts, des centres de tri ou encore des serres agricoles. Dans les environnements semi-structurés, le lieu tolère la machine : le cadre spatial est assez standardisé et des variations locales (objets déplacés, présence clientèle) obligent le robot à adapter sa trajectoire ou son outil. C’est globalement le cas de tous les espaces intérieurs humano-centrés comme les supermarchés, les cuisines, les hôtels, ou encore les hôpitaux. Enfin, dans les environnements peu structurés, la machine doit s’adapter au lieu : l’espace est changeant ou chaotique (relief, météo, surcharge visuelle, obstacles non-répertoriés, circulation humaine ou véhicules aléatoires) et le robot doit combiner locomotion robuste, perception en temps réel et replanification. Il s’agit principalement de lieux en extérieur comme les chantiers BTP, les fermes plein champ, les forêts, les quais portuaires, etc.
Deuxièmement, le volume opérationnel conditionne la rentabilité du robot : plus le taux d’occupation du robot est élevé, plus vite l’investissement est rentabilisé. Trois niveaux de volume opérationnel sont distingués. Dans le premier type d’activité, il pourrait théoriquement y avoir un besoin continu de main-d’œuvre pour assurer une production ou un service 24h24 et 7j/7. Ce serait probablement le cas dans l’industrie, la logistique, les grands hôpitaux ou l’hôtellerie. Dans le deuxième type d’activité, il pourrait théoriquement y avoir un besoin de main-d’œuvre quotidien mais fractionné avec des plages diurnes soutenues puis des pauses la nuit ou le week-end. Il s’agit principalement de services dépendant d’une clientèle éveillée, comme la vente et la restauration, les serres agricoles où le travail manuel varie fortement au cours de la journée, ou encore des secteurs réglementés pour éviter les nuisances comme la construction. Enfin, dans le troisième type d’activité, le besoin de main-d’œuvre est ponctuel, les tâches physiques étant épisodiques, comme l’installation ou la maintenance, ou saisonnières, comme la récolte. Dans ce cas, le modèle « robots-as-a-service » pourrait permettre de mutualiser plusieurs sites, mais le temps de déplacement grignotera inévitablement sur le temps d’opération.
Chaque activité peut ainsi être classée en fonction du degré de structuration de son environnement et de son volume opérationnel théorique, comme illustré dans le tableau ci-dessous. Cette matrice exploratoire offre un cadre d’analyse utile pour identifier les domaines où les robots humanoïdes pourraient être adoptés en priorité : plus on se déplace vers le bas du tableau, plus les défis à relever en termes de mobilité et d’adaptabilité sont importants, et plus on se déplace vers la droite plus le coût d’achat du robot devra être faible pour que l’investissement devienne rentable.
Trois limites doivent être toutefois notées. Premièrement, cette analyse ne prend pas en compte la complexité des tâches : dans les ateliers d’art, la production ne sera pas aussi simple à automatiser que dans l’industrie et dans les services, les interactions humain-machine impliquent un haut degré de compréhension et d’adaptation contextuelle. Deuxièmement, cette analyse ne prend pas en compte le critère d’acceptation sociale des robots, qui pourrait constituer un frein au déploiement dans les services. Enfin, l’analyse mérite d’être affinée en se basant sur une nomenclature d’activité plus granulaire, le volume opérationnel théorique pouvant varier au sein d’un même grand secteur.
Matrice des opportunités d’automatisation.
État des lieux : la réalité se rapproche de la fiction sans l’égaler
Marché : une dynamique inédite dans la recherche et le développement de nouveaux prototypes
Michio Kaku et Olivier Courcelle, Une brève histoire du futur : comment la science va changer le monde, Champs, Flammarion, 2016, p. 61.
Diamandis, op.cit.
RoboServices — IA & Robotique Humanoïde, « Robotique : IA, agent et humanoïdes (post LinkedIn) », [en ligne].
Morgan Stanley Research, The Humanoid 100: Mapping the Humanoid Robot Value Chain, Morgan Stanley Wealth Management, 6 février 2025 [en ligne].
Daniel Bleakley, “Will batteries follow Moore’s law? China invests $A1.3 billion into solid-state battery research”, The Driven, 5 juin 2024 [en ligne].
Selon les données de Google Patent.
Après des décennies de développement expérimental marquées par des avancées technologiques remarquables mais aux applications limitées, la robotique humanoïde connaît, depuis le début des années 2020, un nouvel essor : les investissements en R&D dans la robotique humanoïde explosent et les nouveaux prototypes, de plus en plus opérationnels, se multiplient de façon exponentielle. Les acteurs sont principalement chinois et américains, avec quelques fabricants européens, et viennent d’horizons variés : pure players spécialisés dans l’humanoïde, entreprises issues de la robotique traditionnelle, ou encore géants de l’automobile et de l’électronique soucieuses de ne pas rater la prochaine révolution industrielle.
Histoire : les premiers robots humanoïdes expérimentaux
Le WABOT-1, développé à l’Université de Waseda au Japon au début des années 1970, soit 10 ans après la sortie du premier robot industriel, est unanimement considéré comme le premier robot humanoïde anthropomorphe à grande échelle du monde19. Le WABOT-1 était un robot complexe pour son époque : il était capable de communiquer avec une personne en japonais, de mesurer les distances et les directions des objets grâce à des récepteurs externes, de produire des sons grâce à une bouche artificielle, de marcher et de manipuler des objets avec ses mains dotées de capteurs tactiles. En 1983, le WABOT-2 gagne en dextérité et est notamment capable de jouer du piano tout en lisant une partition.
Une étape cruciale est franchie avec le Honda Série E en 1986, qui introduit la marche dynamique où le robot maintient activement son équilibre pendant le mouvement, permettant des déplacements plus rapides et potentiellement sur des terrains moins uniformes, puis avec le robot ASIMO en l’an 2000, toujours de Honda, qui restera célèbre pour sa capacité à marcher, courir, monter des escaliers et interagir avec les humains avec une apparente fluidité.
Cependant, les applications commerciales de ces robots restent très limitées en raison de leur manque d’autonomie : ce sont essentiellement des automates téléguidés, comme le WABOT (niveau d’autonomie 0), ou préprogrammés (niveau d’autonomie 1). Comme le relate le physicien Michio Kaku, « chaque mouvement, chaque nuance de ma scène avec ASIMO devant les caméras avait été soigneusement écrite à l’avance […] Après coup, j’ai pu discuter franchement avec les créateurs d’ASIMO, et ils ont admis que ce robot, en dépit de ses mouvements et ses actions remarquablement humaines, possédait à peine l’intelligence d’un insecte20 ».
Recherche : un nouvel élan depuis 2018 visible dans l’explosion du nombre de brevets déposés
À partir de la fin des années 2010, la convergence de trois révolutions technologiques donne un nouvel élan à la robotique humanoïde. Premièrement, les progrès en intelligence artificielle permettent non seulement aux robots d’interagir avec le monde de manière plus autonome, mais aussi d’apprendre de leur expérience (réelle ou virtuelle) en un temps record21. L’apprentissage en environnement simulé permet notamment à certains robots d’acquérir en quelques semaines une maîtrise du mouvement « qui aurait nécessité auparavant plus de 6 mois22 ». Deuxièmement, les avancées matérielles (capteurs, actionneurs et autres composants physiques) permettent la conception de corps humanoïdes de plus en plus sophistiqués et pour un coût qui ne cesse de diminuer23.
Enfin, ces avancées n’auraient pas été possibles sans la baisse du coût des batteries et les gains de densité énergétique (+20% tous les deux ans) enregistrés ces dernières années24.
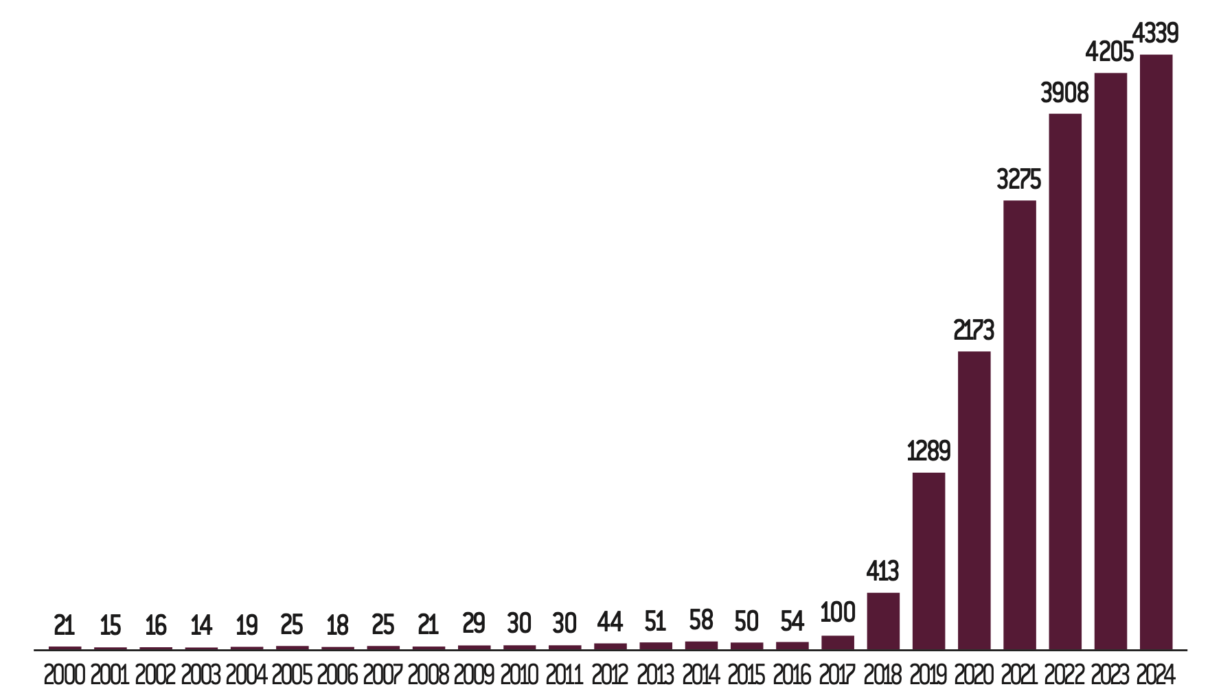
Le vif intérêt pour le domaine se lit dans l’explosion des brevets mentionnant le terme « humanoïde » : une trentaine par an au début des années 2010, contre plus de 4.300 en 2024, soit une croissance annuelle moyenne de 71% depuis 2017, contre environ 10% entre 2000 et 2017 (voir graphique ci-dessous)25. À noter que l’immense majorité de ces brevets sont américains (70%), japonais (11%) ou chinois (7%).
Nombre annuel de brevets déposés relatifs aux humanoïdes
Source :
Google Patents
Investissements : une explosion depuis 2024, du fait de quelques entreprises
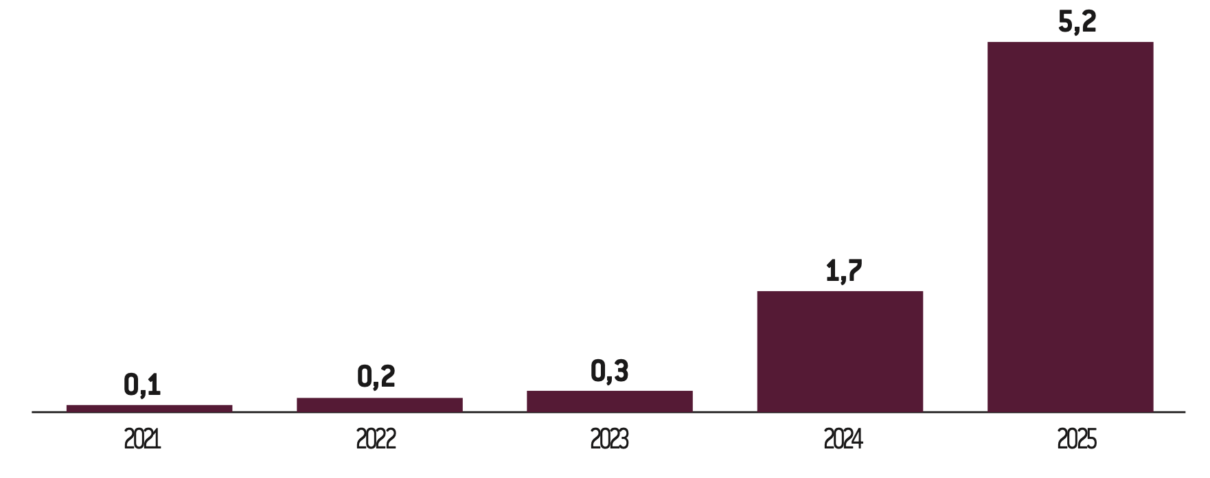
Partis d’un niveau très bas en 2021 (100 millions d’euros), les investissements en capital-risque dans la robotique humanoïde et les modèles fondationnels ont progressé de 179% par an en moyenne dans le monde occidental26 pour atteindre 5,2 milliards d’euros en 2025, selon les données de F’Prime27. Trois entreprises ont levé à elles seules plus de 3 milliards d’euros : 1,5 milliards d’euros pour Figure AI, 1 milliard d’euros pour 1X et 734 millions d’euros pour Apptronik28. Ces chiffres ne couvrent que les levées de fonds des start-ups, hors investissements sur fonds propres des acteurs historiques, et n’intègrent pas le marché asiatique.
Investissements mondiaux en capital-risque dans les robots humanoïdes (en milliards d’euros)
Source :
F-Prime (2026).
RoboServices — IA & Robotique Humanoïde, « Robotique : IA, agent et humanoïdes » [en ligne]. Le projet de BYD n’a pas été pris en compte car encore en développement et peu de données sont disponibles.
Diamandis, op. cit.
Le robot Valkyrie de la Nasa, dévoilé en 2013, et Sophia de Hanson Robotics, branchée en 2015, n’ont pas été intégrés, car pas à visée commerciale.
Développement de prototypes : une accélération fulgurante depuis le début des années 2020
L’intérêt suscité par la robotique humanoïde se reflète également dans le nombre croissant de nouveaux modèles dévoilés. Le domaine est aujourd’hui si dynamique qu’il est difficile de suivre toutes les actualités : le site consacré aux robots humanoïdes, Humanoid.guide, recensait une trentaine de modèles début 2025 et une centaine début 202629. Pour la suite de l’analyse, un échantillon de 18 modèles a été retenu. Cet échantillon reprend essentiellement les modèles recensés par RoboServices dans son trombinoscope de mars 202530, complété de quelques autres modèles jugés prometteurs, incluant ainsi les leaders du marché (Tesla, Figure AI, Boston Dynamics, Agility Robotics et Unitree) et les principaux nouveaux entrants selon la cartographie du prospectiviste et entrepreneur Peter Diamandis31. Les prototypes ne répondant pas strictement à la définition d’un humanoïde (deux bras, deux jambes) ont été exclus.
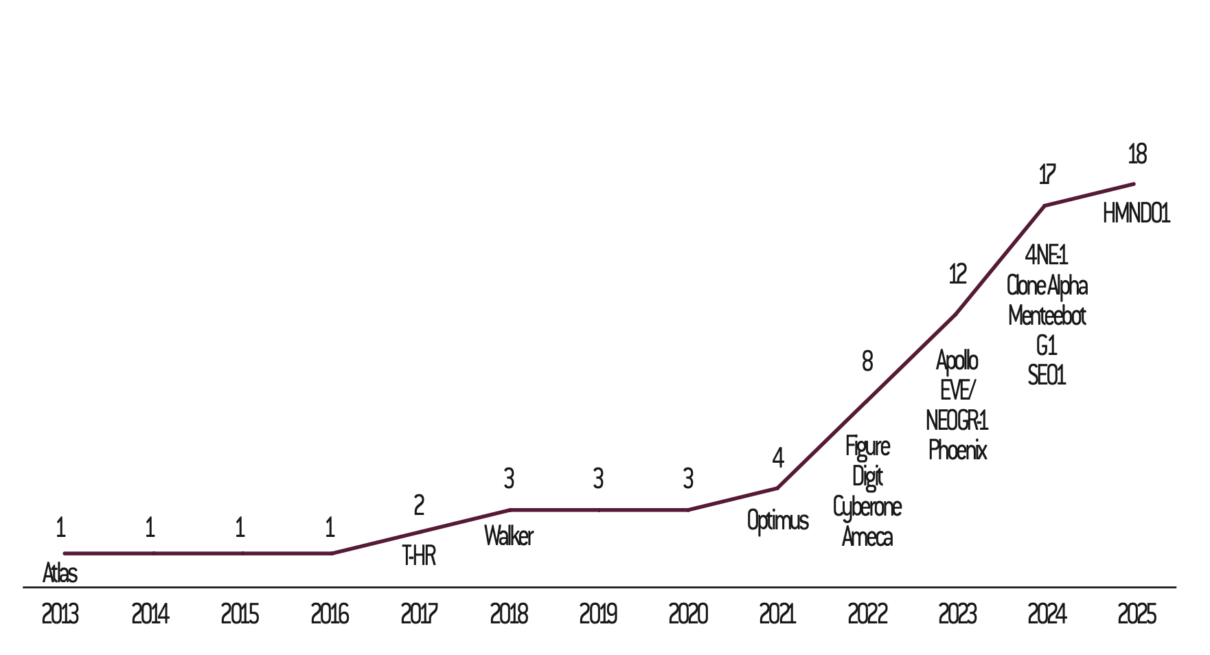
Le graphique ci-dessous montre le nombre cumulé de robots humanoïdes de nouvelle génération dévoilés depuis 2013, date de l’annonce du robot Atlas de Boston Dynamics – seules les premières générations sont comptabilisées afin de ne pas compter plusieurs versions d’un même robot. Alors que le nombre de modèles en développement augmente peu entre 2013 et 2021, passant d’un à quatre, il croît de manière exponentielle de 2021 à 2025, passant de quatre à dix-huit modèles de robots humanoïdes. Cette explosion du nombre de prototypes humanoïdes n’est pas un biais d’échantillon : jusqu’en 2020, le recensement est quasi exhaustif32.
À noter que tous les modèles ne se ressemblent pas. Certains font des choix stratégiques différents. Par exemple, avec Ameca, l’entreprise Engineered Arts cherche à se rapprocher autant que possible de l’apparence humaine, pour des applications dans les services. D’autres entreprises comme Tesla ou Figure AI misent sur un look futuriste inspiré de la science-fiction. Récemment, une entreprise a dévoilé un modèle capable de rouler sur un sol plat et de bloquer ses roues pour monter un escalier ou franchir un obstacle, montrant qu’il est possible de combiner l’ingéniosité humaine à l’expérience de la nature pour optimiser les aptitudes des robots33.
Nombre cumulé de robots humanoïdes nouvelle génération dévoilés, selon l’année du dévoilement (en %)
Typologie de fabricants : une majorité de pure players
Les robots humanoïdes de l’échantillon sont à 56% développés par des « pure players », c’est-à-dire des entreprises développant exclusivement des humanoïdes, comme Figure AI, Apptronik, Agility Robotics, Clone, 1X, Humanoid AI, etc. Les 44% de non-pure players sont essentiellement issus de la robotique traditionnelle, comme Neura Robotics, Boston Dynamics, Fourier Robotics, UBTech, etc. Enfin, une poignée de fabricants viennent du secteur automobile, comme Tesla ou Toyota, voire de la téléphonie/électronique comme Xiaomi.
Cartographie des fabricants de robots humanoïdes, selon le type (pure player ou non).
Ancienneté des fabricants : des acteurs historiques et de nouveaux entrants
Du point de vue de l’ancienneté, la répartition entre acteurs historiques et nouveaux entrants est assez équilibrée : 28% des fabricants de l’échantillon ont une ancienneté de moins de 5 ans (Humanoid AI, Mentee Robotics, Engine AI, Clone et Figure AI), 22% une ancienneté de 5 à 9 ans (Sanctuary AI, Unitree, Neura Robotics, Apptornik), 28% une ancienneté entre 10 et 19 ans (Agility robotics, 1X, UBTech, Fourier, Xiaomi), et enfin 22% une ancienneté de plus de 20 ans (Toyota, Engineered Arts, Atlas et Tesla). L’ancienneté moyenne des entreprises de l’échantillon est ainsi de 15 ans et l’âge médian de 9 ans et demi, suggérant des temps de développement assez longs.
Répartition de l’ancienneté des fabricants de robots humanoïdes (en %)

« Pour tout le monde » en français.
Nationalité des fabricants : l’Europe en troisième position
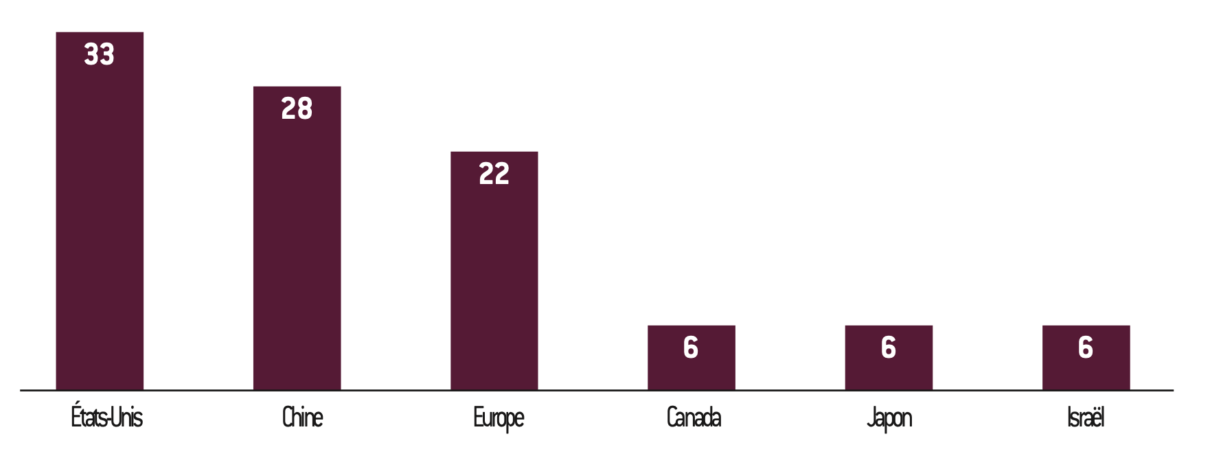
Enfin, en termes de nationalité, les entreprises américaines représentent 33% de l’échantillon, les entreprises chinoises 28% et les entreprises européennes 22%. Plusieurs entreprises européennes prometteuses méritent d’être mentionnées : l’entreprise allemande Neura Robotics qui développe 4-NE1 (se lit : « for anyone »34), un robot humanoïde destiné à un usage généraliste, le pure player 1X qui développe le robot ménager NEO, l’anglais Engineered Arts qui est devenu célèbre avec son robot Ameca qui simule les expressions faciales humaines, et enfin le nouveau venu britannique Humanoid AI et son prototype généraliste HMND01. À noter que Reachy 2 de Pollen Robotics, récemment racheté par le français Hugging Face, n’est pas un robot bipède et n’a donc pas été intégré à l’analyse.
Répartition de la nationalité des fabricants de robots humanoïdes (en %)
Maturité : des prototypes en phase de démonstration, encore limités à des usages spécifiques dans des environnements semi-structurés
Une distinction est établie dans cette étude entre maturité commerciale et maturité technologique. La maturité commerciale est mesurée par l’échelle TRL et correspond à l’avancement du produit dans le processus de développement et commercialisation. La maturité technologique vise tout simplement à évaluer les performances techniques du produit, indépendamment de leur stade de commercialisation. La nuance entre les deux est importante : un robot peut être avancé technologiquement mais pas commercialisé, et à l’inverse, des robots peuvent être commercialisés prématurément. Sur le plan commercial, il ressort de l’analyse que la plupart des prototypes sont en phase de démonstration et pourraient bientôt entrer en phase de commercialisation. Sur le plan technique, les prototypes actuels restent limités à des usages spécifiques dans des environnements semi-structurés.
Maturité commerciale :
un marché naissant avec peu d’exemples commerciaux concrets
La maturité d’une technologie ou d’un produit peut être évaluée à l’aide de l’échelle « technology readiness level » ou « TRL ». Selon les variantes, cette échelle peut aller de 1 à 9 (échelle originelle de la Nasa) ou de 1 à 11 (TRL revisité de l’AIE). Dans cette étude, l’échelle de l’Agence internationale de l’énergie, plus précise, est préférée. Cette échelle identifie six grands stades de maturité : concept (TRL 1 à 3), petit prototype (4), large prototype (5 à 6), démonstration (7 à 8), début de l’adoption (9 à 10) et maturité (11). Une note a été manuellement attribuée à chaque modèle de l’échantillon selon son avancement dans le processus de développement et commercialisation.
In fine, la majorité des robots sont en phase de développement ou de démonstration. Dans le détail, les modèles en développement, comme Clone Alpha ou HMND01, représentent 39% de l’échantillon. Les modèles en phase de démonstration, comme Optimus testé en interne sur les chaînes de production de Tesla, ou Figure AI et Apollo en test dans des usines partenaires, représentent une part similaire de l’échantillon. Enfin, les modèles déjà disponibles en vente libre, comme Digit qui est utilisé par Amazon et dont la production en série a débuté dans l’usine Robofab, ou encore G1 et NEO commercialisés récemment, représentent 22% de l’échantillon. À noter que certains prototypes en démonstration pourraient rapidement basculer en phase de commercialisation – Figure AI prévoit par exemple de livrer 100.000 unités dans les quatre années à venir35.
Maturité commerciale des robots humanoïdes de l’échantillon (en %)

Robert Riener, Luca Rabezzana et Yves Zimmermann, “Do robots outperform humans in human-centered domains?”, Frontiers in Robotics and AI, vol. 10, 07 novembre 2023 [en ligne].
Meet NEO, Your Robot Butler in Training (vidéo), YouTube.
Rodney Brooks, “Why Today’s Humanoids Won’t Learn Dexterity”, RodneyBrooks.com (blog), 26 septembre 2025 [en ligne].
Maturité technologique : des prototypes encore loin de la polyvalence et de l’adaptabilité d’un humain
Le TRL renseigne surtout sur la maturité commerciale : plus l’échelle se rapproche du niveau 11, plus le produit a prouvé sa fiabilité sur le terrain, son modèle économique et une demande durable. Toutefois, atteindre un TRL de niveau 9 ne garantit pas que la technologie évoluera jusqu’au niveau 11. À ce stade, sa capacité à répondre pleinement aux attentes du marché reste incertaine. Il est donc nécessaire, en complément, d’évaluer les performances techniques des robots humanoïdes, indépendamment de leur maturité commerciale.
En novembre 2023, des chercheurs ont comparé les performances d’une vingtaine de modèles humanoïdes disponibles entre 2000 et 2021 pour aboutir à la conclusion que « seuls certains robots, qui ont été optimisés pour des tâches très spécifiques dans des environnements semi-structurés, atteignent des performances qui peuvent rivaliser avec des humains moyens dans cette tâche spécifique36 ». Parmi les défis à relever, les auteurs relevaient notamment la dextérité et la versatilité du mouvement humain, et l’adaptabilité et la compréhension contextuelle. Cette analyse n’intégrait cependant pas les modèles récents dévoilés après 2021, date à laquelle, justement, le nombre de modèles a explosé. Est-ce possible que des entreprises comme Tesla, 1X, ou Figure AI, pour ne citer que celles-ci, aient réalisé des progrès qui remettraient en question la conclusion des chercheurs en 2023 ? Les informations disponibles publiquement ne semblent pas aller dans ce sens.
Concernant la dextérité, si d’importants progrès ont été réalisés, les robots peinent encore à effectuer des tâches, même simples, avec aisance. Par exemple, dans un TED Talk publié en mai 202537, le prototype NEO de 1X, chargé d’effectuer des tâches du quotidien, apparait encore hésitant et peu précis : le doigt manque la cible ou glisse avant d’appuyer, les phalanges se positionnent mal autour des poignées, et le robot doit parfois utiliser sa seconde main pour libérer une prise. Même des gestes de précision modérée, comme verser de l’eau pour arroser une plante, trahissent un contrôle moteur encore approximatif. En outre, chaque tâche semble accomplie au ralenti. Un internaute résume la maladresse du robot avec humour : « NEO a l’air capable de mettre accidentellement le feu à votre maison et de rester là à la regarder en train de brûler ». Et d’après le spécialiste de la robotique Rodney Brooks, les générations actuelles d’humanoïdes, entraînés sur des données visuelles, n’atteindront jamais le niveau de dextérité d’un humain, qui requiert le sens du toucher38. Aujourd’hui, la manipulation fine représente donc un enjeu si complexe que certains fabricants, comme Apptronik, préfèrent l’abandonner39.
Au-delà de la dextérité, l’évaluation de l’autonomie réelle et de l’adaptabilité contextuelle des humanoïdes se heurte à un manque de données indépendantes et non biaisées. Si les constructeurs multiplient les démonstrations de tâches complexes, ces performances résultent souvent d’un entraînement intensif sur des scénarios spécifiques (« overfitting »), limitant leur généralisation à des environnements imprévus. La persistance de la télé-opération, même lors d’événements majeurs comme le « We, Robot » de Tesla ou pour des modèles récemment commercialisés comme le NEO de 1X, souligne une réalité cruciale : la compréhension situationnelle à 360° en temps réel demeure un défi technique majeur. Ce recours à l’assistance humaine, souvent discrète, souligne qu’un score élevé sur l’échelle TRL (indiquant une commercialisation ou un déploiement) ne garantit pas nécessairement une véritable maturité technologique.
Coût : des prototypes déjà compétitifs face à la main-d’œuvre humaine dans l’industrie
Le coût constitue en soi un indicateur de la maturité d’une technologie : souvent les solutions existent mais pas à un prix commercialement viable. L’unité de comparaison avec la main-d’œuvre humaine est le coût horaire, qui intègre pour les robots humanoïdes le coût fixe (coût d’acquisition), les coûts variables (maintenance et énergie) et le nombre total d’heures de service. Étant donné le degré d’incertitude sur ces données, plusieurs scénarios sont retenus pour les coûts fixe et variables, et le coût horaire est ensuite décliné par typologie de secteurs.
Coût fixe : entre 14.000€ et 285.000€ selon les modèles et les estimations
Deux approches permettent d’estimer le coût d’achat des robots humanoïdes. La première s’appuie sur les communications des fabricants, qui annoncent le prix auquel ils ambitionnent de commercialiser leur produit. Cette approche offre un aperçu des coûts en production de masse, mais présente un biais optimiste, les fabricants ayant intérêt, dans leur communication, à sous-estimer les défis techniques et économiques. La seconde approche repose sur des rapports indépendants qui évaluent le coût total de production en analysant les composants individuels des robots. Cette méthode est plus objective mais reste conservatrice car elle ne tient pas compte des économies d’échelle et des gains d’efficacité liés aux courbes d’apprentissage industriel.
Concernant la première approche, d’après les données du site Humanoid Guide, le prix annoncé des modèles de l’échantillon est de 65.000€ en moyenne et varie de 14.000€ pour le G1 d’Unitree à 176.000€ pour le 4NE-1 de Neura Robotics. L’écart de prix s’explique essentiellement par la sophistication des modèles et le nombre d’options. G1 est par exemple proposé à partir de 14.000€, mais n’inclut pas de mains. Ajouter une paire de mains double le prix, et il s’agira de mains à trois doigts, n’offrant qu’une dextérité et une sensibilité limitées40. Sans surprise, plus le robot se rapproche de l’état de l’art plus son prix est élevé.
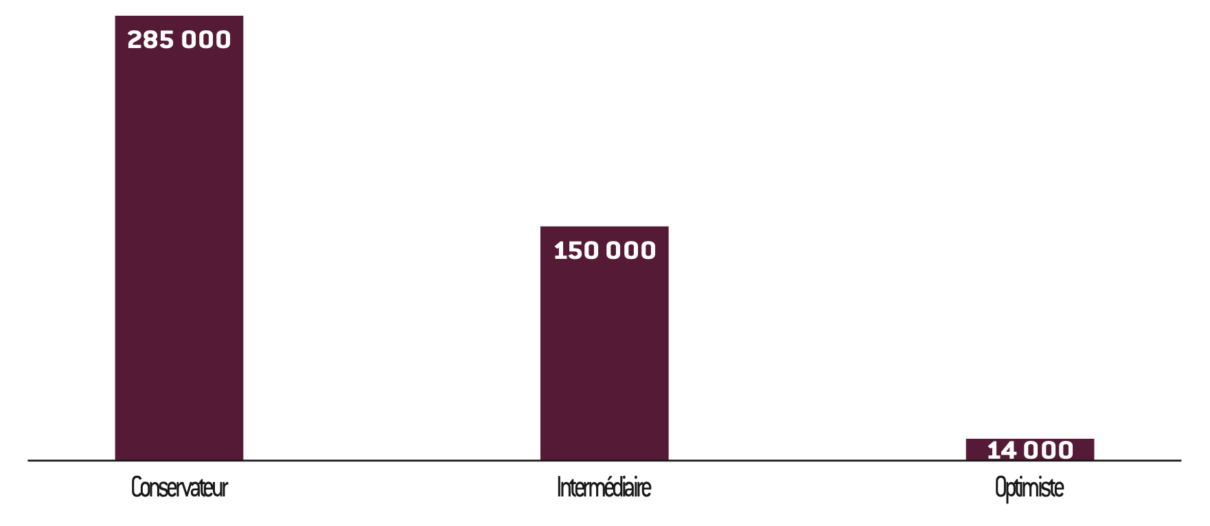
En moyenne, ces coûts annoncés semblent plutôt optimistes par rapport aux estimations de la littérature. Goldman Sachs, par exemple, estime le coût moyen à 142.500€ en 2024, en baisse de 40% par rapport à 2023 sous l’effet de la baisse des prix des composants41, et pour Morgan Stanley, la fourchette de prix varie de 9.500€ à 285.000€, soit un prix médian de 147.250€42. Eu égard à ces incertitudes, trois scénarios sont retenus pour la suite de l’analyse : un scénario optimiste à 14.000€, un scénario conservateur à 285.000€, et un scénario intermédiaire à 150.000€. Philosophiquement, ces scénarios peuvent à la fois correspondre à des degrés de sophistication et à des horizons temporels différents.
Coût d’achat actuel des robots humanoïdes selon le scénario (en euros)
Jacqueline Du, op. cit.
Guillaume Moukala Same et Charles-Antoine Schwerer, La chirurgie robot-assistée : une innovation qui profite au patient, au chirurgien et peut générer des économies, Asterès, juin 2023 [en ligne].
Coût variable : entre 10% et 30% du coût d’achat par an pour la maintenance, et un coût énergétique négligeable
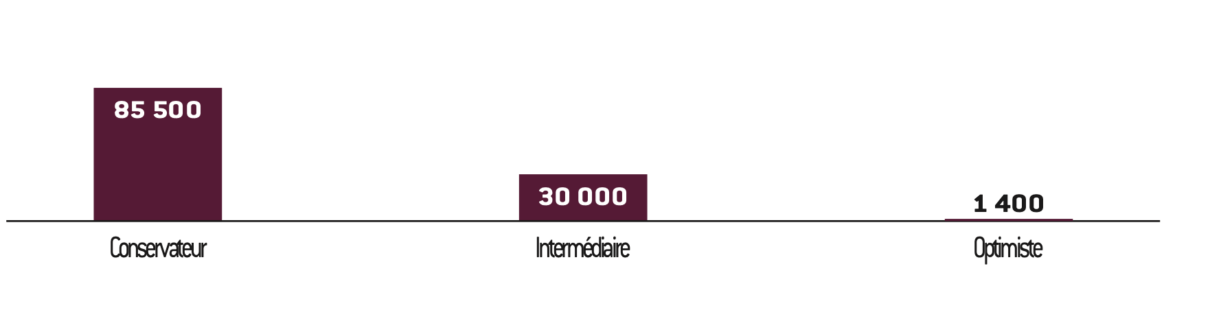
Les coûts de maintenance des robots varient significativement selon leur complexité. Pour les robots industriels traditionnels, ces coûts représentent annuellement entre 10% (scénario optimiste) et 20% (scénario intermédiaire) du prix d’achat43. Les robots humanoïdes, nécessitant probablement l’intervention de techniciens hautement spécialisés, pourraient générer des coûts de maintenance plus élevés. L’hypothèse conservatrice retenue est donc de 30% du coût d’achat par an, soit le double de la médiane des robots conventionnels. À titre de comparaison, le coût de maintenance annuel des robots chirurgicaux qui équipent les hôpitaux français représente environ 8% du coût d’achat. L’hypothèse la plus optimiste reste donc relativement conservatrice44. Des travaux ultérieurs pourront chercher à préciser cette hypothèse.
Les coûts énergétiques restent marginaux. La consommation énergétique d’un robot en fonctionnement se situe entre 200W et 500W (0,20 – 0,50kW). Au tarif réglementé de 0,2016€/kWh45, une heure de fonctionnement coûte donc de 0,04€ à 0,10€, selon la puissance sollicitée. Cette dépense énergétique peut donc être considérée comme négligeable dans l’analyse économique globale.
Coût annuel de maintenance, selon le scénario (en euros)
Coût horaire : d’importantes variations selon les hypothèses et le secteur
Le volume horaire théorique dépendant essentiellement du secteur, les trois scénarios (conservateur, intermédiaire et optimiste), peuvent être déclinés par secteur, en maintenant fixes les hypothèses de coût d’achat (respectivement 285.000€, 150.000€ et 14.000€) et de durée de vie (respectivement 12 ans, 6 ans et 3 ans), et en faisant varier uniquement le taux de fonctionnement des robots : 70% à 90% pour les secteurs à flux continu (soit 118 à 151 heures par semaine), 40% à 60% pour les secteurs à flux quotidien mais fragmenté (soit 67 à 101 heures par semaine), et 10% à 30% pour les secteurs à flux intermittent ou ponctuel (soit 17 à 50 heures par semaine). Ces taux de fonctionnement sont crédibles, les experts estimant qu’en prenant en compte les contraintes de recharge, les robots humanoïdes pourraient fonctionner au minimum 16 heures par jour et potentiellement jusqu’à 22 heures par jour46.
Deux enseignements principaux ressortent. Premièrement, dans les secteurs à flux continu comme l’industrie, la logistique ou la santé en milieu hospitalier, à l’exception de l’hôtellerie, le coût horaire des humanoïdes est inférieur au coût horaire de la main-d’œuvre dans tous les scénarios. Deuxièmement, le coût horaire des humanoïdes est compétitif face à la main-d’œuvre humaine dans tous les secteurs à partir du scénario intermédiaire, c’est-à-dire pour un coût d’achat de 150.000€ et une durée de vie de 6 ans, deux hypothèses qui sembleront raisonnables quand le marché aura atteint la maturité.
Enfin, une dernière hypothèse testée (non représentée graphiquement) envisage une durée de vie fixe de douze ans dans l’ensemble des scénarios. Elle correspond à un marché arrivé à maturité, où les avancées technologiques ralentissent et deviennent principalement incrémentales. Avec cette hypothèse, le coût horaire de la main-d’œuvre humanoïde est compétitif dans tous les secteurs et dans tous les scénarios. La seule exception est le scénario le plus conservateur de tous (taux de fonctionnement de 10%, coût d’achat de 285.000€), mais ce scénario apparait peu crédible même dans les activités où le besoin est ponctuel et intermittent car le modèle de « robot-as-a-service » permettra probablement d’optimiser le taux de fonctionnement. Eu égard à tous ces éléments, les entreprises ne devraient pas rencontrer de difficultés à rentabiliser leur investissement sur le long terme.
Coût horaire estimé de la main-d’œuvre humanoïde selon le secteur, dans différents scénarios (en euros)
Prospective : des applications de niche à la société post-travail, un éventail de scénarios reste possible
Alfred Sauvy et Anita Hirsch, La Machine et le chômage : le progrès technique et l’emploi, coll. Pluriel, Hachette, 1982.
Socle macro-économique commun : la croissance par la productivité et la demande
Quel que soit le scénario, les robots humanoïdes entraîneront une réallocation de la main d’œuvre, des gains de productivité, et des gains de pouvoir d’achat. Seule l’ampleur de ces effets dépend du scénario, pas leur nature.
Premièrement, l’émergence des robots humanoïdes va conduire à une réallocation de la main-d’œuvre humaine, à plusieurs niveaux, générant des gains de productivité et de la croissance. Il s’agit d’un effet classique du progrès technologique. Dans certains secteurs, comme la santé, les robots ne se substitueront que partiellement à la main-d’œuvre et libéreront ainsi du temps pour se concentrer sur les dimensions relationnelles, décisionnelles ou nécessitant un jugement humain : c’est la réallocation intra-sectorielle. Dans les secteurs industriels ou agricoles, où ces dimensions humaines sont négligeables, les robots se substitueront entièrement à la main d’œuvre, qui migrera dans les services : c’est la réallocation intersectorielle. Ce processus, aussi appelé déversement sectoriel47, est déjà à l’œuvre depuis le début de l’ère industrielle, et les robots humanoïdes ne feront que le prolonger jusqu’à ce que, in fine, ne subsistent que les métiers où les qualités proprement humaines priment – bien que la nature exacte de ces qualités reste à définir. Cette réallocation générera des gains de productivité à l’échelle macro-économique et donc de la croissance intensive : plus de valeur peut être créée avec la même quantité de capital humain. Ces gains de productivité ne seront limités que par la capacité de l’économie à accroître le stock de robots.
Deuxièmement, l’émergence des robots humanoïdes aura un effet déflationniste dans les secteurs concernés, libérant du pouvoir d’achat qui pourra être réinjecté dans l’économie. La main-d’œuvre humaine sortant des coûts de production, les prix des biens et services robotisables baisseront plus ou moins fortement selon le scénario et l’intensité en main-d’œuvre. Les ménages disposeront de plus de capacité de dépense, augmentant la demande agrégée dans l’économie, et générant un cycle vertueux de croissance et de demande. Dans l’histoire économique, ces « effets rebonds » ont constitué un moteur majeur de la croissance économique48. Par exemple, la mécanisation de l’industrie textile durant la révolution industrielle a considérablement réduit les coûts de production, rendant les vêtements accessibles à une large part de la population et créant l’industrie de la mode, virtuellement inexistante auparavant. La baisse des coûts de production des produits de grande consommation (vêtements, aliments, etc.) a aussi permis l’essor des services. Demain, ce seront peut-être des secteurs comme la santé, l’éducation ou la culture qui se développeront sous le double effet des gains de pouvoir d’achat et de la réallocation de la main-d’œuvre.
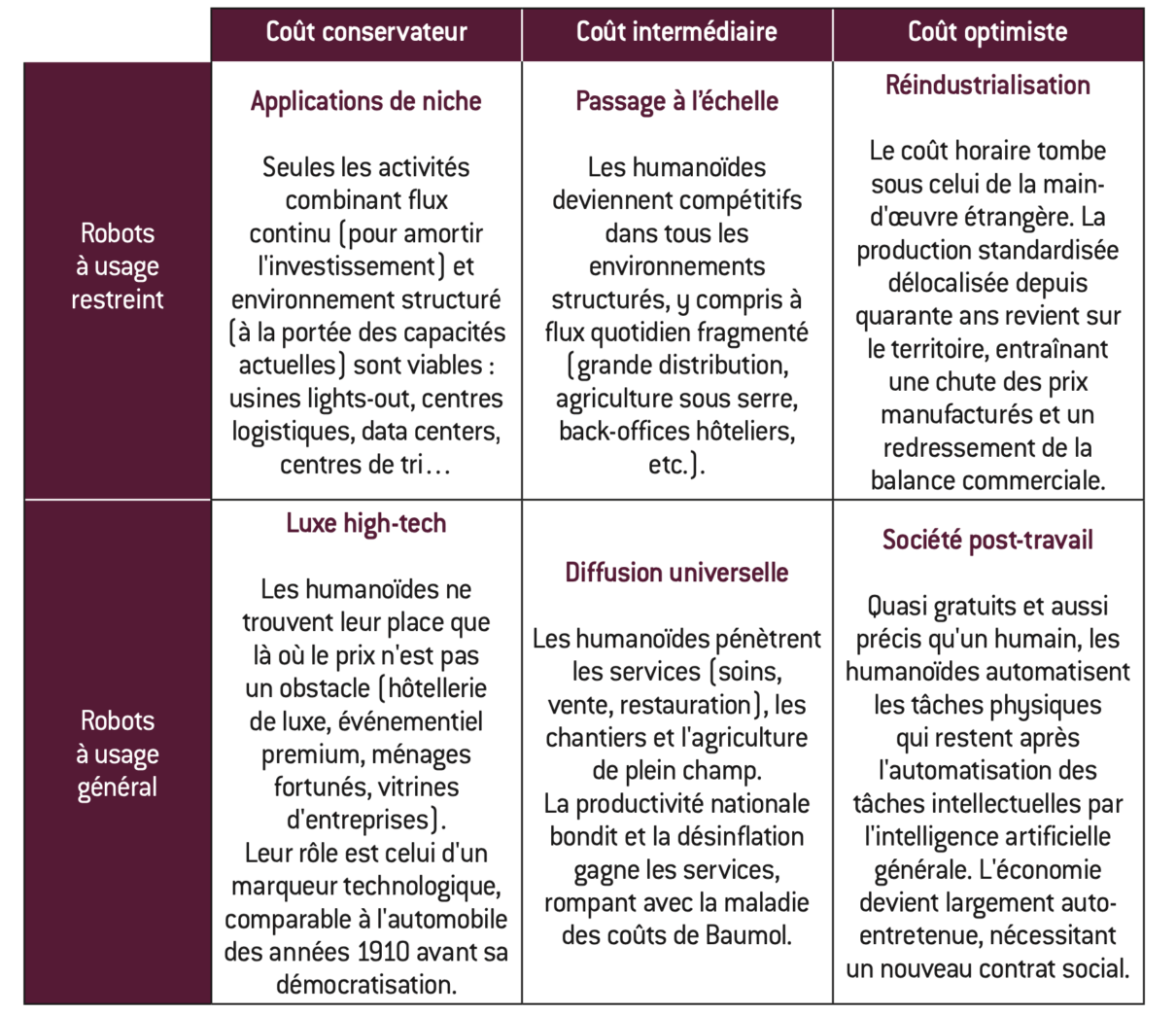
Scénarios : 6 visions du futur selon l’avancement technologique et le coût des robots
L’ampleur des effets macroéconomiques détaillés ci-dessus dépendront essentiellement de deux facteurs qui demeurent à ce jour incertains : leur avancement technologique et leur coût. Plusieurs hypothèses, de la plus conservatrice à la plus optimiste, peuvent être considérées pour chacune de ces dimensions.
Pour la dimension technique, les robots peuvent rester limités à des tâches simples et répétitives, pour lesquelles ils ont été spécifiquement entraînés, et dans un environnement structuré ou semi-structuré comme actuellement (robot à « usage restreint »), où les obstacles techniques peuvent être surmontés et où les robots acquièrent alors une polyvalence et une adaptabilité comparable à celle des humains (robots à « usage général »).
Pour la dimension économique, le coût d’acquisition peut rester très élevé comme aujourd’hui pour les modèles les plus sophistiqués (coût conservateur), se stabiliser au coût médian actuel (coût intermédiaire), ou diminuer grâce aux effets d’expérience et atteindre le coût des modèles minimalistes actuels (coût optimiste). En combinant ces différentes hypothèses, six scénarios peuvent être imaginés, décrits dans le tableau ci-dessous.
Le même mécanisme joue dans chaque case : tant que le coût descend, la zone de diffusion s’élargit, des secteurs où le volume horaire théorique est le plus important vers les secteurs où ce volume est le moins important. La ligne « usage général » agit comme un multiplicateur : à coût égal, elle ajoute simplement davantage de secteurs accessibles. Les effets macroéconomiques s’intensifient et l’horizon temporel s’étire graduellement selon la diagonale coût-capacité, jusqu’au scénario post-
rareté où les robots peuvent accomplir n’importe quelle tâche pour un coût quasi nul. Cette progression n’est pas linéaire : un seul palier franchi peut déclencher une adoption massive dans certains secteurs ou encore la relocalisation de certaines industries.
Six scénarios de l’impact économique des robots humanoïdes selon leur coût et leur maturité technologique.
Limites : ressources naturelles, lien social et dépendance technologique
Ce cadre analytique reste une vision simplifiée de la réalité et omet d’autres facteurs essentiels. Premièrement, ces scénarios ne prennent pas en compte la disponibilité des ressources. En effet, la production en masse de robots humanoïdes, en plus de la production de véhicules électriques, éoliennes et panneaux photovoltaïques, pourrait accroître la tension sur les métaux rares, et augmenter le coût d’acquisition. Sans solution à ce problème (recyclage en boucle fermée, alternatives aux métaux rares, minage d’astéroïdes), les scénarios les plus optimistes sur le stock de robots et le degré d’automatisation de l’économie (choc humanoïde, société post-rareté) paraissent peu crédibles.
Deuxièmement, ces scénarios ne prennent pas en compte la dimension sociale du travail humain. Même dans l’hypothèse d’un robot à usage général, il n’est pas nécessairement désirable d’automatiser tous les métiers. Dans de nombreux services, la valeur du travail ne repose pas seulement sur l’efficacité ou la performance, mais sur l’interaction humaine elle-même.
Commander une boisson dans un bar n’est pas qu’un acte fonctionnel : c’est une expérience humaine en tant que telle, un moment de convivialité et d’échange. De même, dans la santé, l’acte de soin ne se réduit pas à une série de gestes techniques : il repose aussi sur l’écoute, l’attention portée au patient et la relation de confiance. Les robots peuvent simuler l’empathie et se faire passer pour des humains dans des environnements numériques, mais dans le monde physique, leur apparence trahit inévitablement leur nature artificielle.
Troisièmement, ces scénarios n’intègrent pas la question de l’acceptation ou non de ces technologies. Dans les scénarios « diffusion généralisée » et « société post-rareté », l’humanité a donné naissance à une nouvelle espèce : une intelligence artificielle incarnée, dotée d’un corps et capable d’agir physiquement sur le monde. Le degré d’automatisation de l’économie est tel qu’elle s’apparente à un organisme autonome, se développant indépendamment de toute action humaine. L’ensemble du cycle, de la conception à la mise en œuvre, est pris en charge par des entités artificielles – les robots eux-mêmes assurent leur propre maintenance, et peuvent même s’auto-améliorer. Dans ce scénario, le risque est que l’humanité ne délègue pas seulement le travail à la machine, mais qu’elle perde le contrôle de son destin. In fine, les mêmes questions éthiques qui se posent avec l’IA se posent avec les robots humanoïdes.
Conclusion
Les révolutions de l’intelligence artificielle et de la robotique humanoïde sont les deux faces d’une même médaille : un jour, le cerveau et la machine ne feront plus qu’un. Le volet physique de l’IA est donc aussi stratégique que son volet cognitif. Mais, à la différence de l’intelligence artificielle, déjà largement adoptée, la robotique humanoïde repose encore essentiellement sur des promesses. Le paradoxe de Moravec reste d’actualité49 : les machines surpassent aujourd’hui les humains dans les tâches cognitives les plus complexes mais sont encore loin d’interagir avec leur environnement physique avec la même fluidité.
Dans ces conditions, il est probable que la prochaine décennie ressemblera davantage à un cycle de désillusion qu’à une révolution industrielle. Le précédent des voitures autonomes, promises de longue date et toujours confinées à des périmètres restreints, invite à la plus grande prudence face aux calendriers annoncés par les fabricants.
Ce scepticisme de court terme ne doit pas se confondre avec un scepticisme de long terme. Rien n’indique que les verrous actuels soient indépassables. L’échec n’est pas certain, la réussite non plus, et c’est précisément pour cette raison que l’Europe ne peut pas se permettre de décrocher, même si la phase actuelle ressemble à une bulle. Il faut par conséquent investir sans délai dans la R&D, sécuriser les briques critiques de la chaîne de valeur, anticiper la tension sur les métaux rares et réfléchir au cadre social et fiscal d’une économie où le capital productif sera incarné.
Ces investissements constituent le ticket d’entrée pour le cycle suivant, celui qui comptera vraiment. L’histoire récente des révolutions technologiques montre qu’elles récompensent ceux qui en prennent le pari tôt et pénalisent durablement ceux qui le prennent trop tard. L’Europe n’a pas droit à un nouveau rendez-vous manqué.
Bibliographie
Sanjay Aggarwal et Betsy Mulé. 2025 State of Robotics Report. F’Prime, 2025.
Alvarez, Simon. « Tesla posts Optimus’ most impressive video demonstration yet ». Teslarati, 21 mai 2025.
Artus, Patrick. « Why is the European industry doing so poorly? » février 2025.
W. J. Baumol, et W. G. Bowen. « On the Performing Arts: The anatomy of Their Economic Problems ». The American Economic Review 55, n° 1/2 (1965): 495‑502.
Javier Bilbao-Ubillos, Vicente Camino-Beldarrain, Gurutze Intxaurburu-Clemente, et Eva Velasco-Balmaseda. « Industry 4.0, servitization, and reshoring: A systematic literature review ». European Research on Management and Business Economics 30, n° 1 (2024): 100234.
Bleakley, Daniel. « Will batteries follow Moore’s law? China invests $A1.3 billion into solid-state battery research ». The Driven, 5 juin 2024.
Bourgin, Yoann. « Hexagon lance Aeon, un robot humanoïde pour l’industrie ». L’Usine Digitale, 18 juin 2025.
Karel Čapek, Jan Rubeš, et Brigitte Munier. RUR: Rossum’s universal robots drame collectif en un prologue de comédie en trois actes. Minos 81e. La Différence, 2011.
Chen, Caiwei. « China’s EV Giants Are Betting Big on Humanoid Robots ». MIT Technology Review, 14 février 2025.
« Coût horaire du travail selon l’activité | Insee ». Consulté le 5 mai 2025.
Diamandis, Peter. 2025-2035 Metatrend Report: The Rise of Humanoid Robots. Abundance360, 2025.
Direction générale du Trésor. « Echanges bilatéraux entre la France et la Chine ». Consulté le 27 juin 2025.
Jacqueline Du, Yuichiro Isayama, Daniela Costa, Mark Delaney, Nick Zheng, et Olivia Xu. Humanoid Robot: The AI Accelerant. Goldman Sachs, 2024.
« Elon Musk présente Optimus, l’ambitieux robot humanoïde de Tesla ». Consulté le 24 juin 2025.
Emerging Space Brief: Humanoid Robotics. PitchBook, 2024.
Hafstad, Johan Christian. « Humanoid Robot Guide ». Humanoid.Guide, 5 mai 2025. https://humanoid.guide/.
N. G. Hockstein, C. G. Gourin, R. A. Faust, et D. J. Terris. « A History of Robots: From Science Fiction to Surgical Robotics ». Journal of Robotic Surgery 1, n° 2 (2007): 113‑18.
« Humanoid Hype: Top VC Sounds the Alarm on China’s Robot Boom ». Consulté le 24 juin 2025. https://www.sixthtone.com/news/1016916.
Humanoid Robotics Institute, Waseda University. « Humanoid History-WABOT- ». Consulté le 6 juin 2025. https://www.humanoid.waseda.ac.jp/booklet/kato_2.html.
« International Organization of Motor Vehicle Manufacturers – 2023 ».
Adam Jonas, Daniela M Haigian, William J Tackett, et Sean K Corley. Humanoids: investment implications of embodied AI. Morgan Stanley, 2024.
Michio Kaku et Olivier Courcelle. Une brève histoire du futur : comment la science va changer le monde. Champs. Flammarion, 2016.
Koetsier, John. « Apptronik Has a Totally Different Approach to Building Humanoid Robots ». John Koetsier, 25 septembre 2023.
Koetsier, John. « Figure Plans To Ship 100,000 Humanoid Robots Over Next 4 Years ». Forbes. Consulté le 9 juin 2025. https://www.forbes.com/sites/johnkoetsier/2025/01/30/figure-plans-to-ship-100000-humanoid-robots-over-next-4-years/.
Le portail de la direction générale des douanes et droits indirects. « Résultats du commerce extérieur de la France pour l’année 2023 ». 7 février 2024. http://www.douane.gouv.fr/actualites/resultats-du-commerce-exterieur-de-la-france-pour-lannee-2023.
LinkedIn. « Post de RoboServices – IA & Robotique humanoïde ». Réseau social. juin 2025. https://www.linkedin.com/posts/roboservices_robotique-ia-agent-activity-7341078118427774982-Oq_W/.
James Manyika, Susan Lund, Michael Chui, et al. Jobs lost, jobs gained: What the future of Work Will mean for jobs, skills, and Wages. McKinsey global Institute, 2017.
McGinn, Colin. Prehension: the hand and the emergence of humanity. The MIT Press, 2015.
Guillaume Moukala Same et Charles-Antoine Schwerer. La chirurgie robot-assistée : une innovation qui profite au patient, au chirurgien et peut générer des économies. Asterès, 2023.
Kazunori Ohno, Shinji Kawatsuma, Takashi Okada, Eijiro Takeuchi, Kazuyuki Higashi, et Satoshi Tadokoro. « Robotic control vehicle for measuring radiation in Fukushima Daiichi Nuclear Power Plant ». 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, IEEE, novembre 2011, 38‑43.
Perea, Matias. « 9 juin 2025 : le prix de l’électricité sur les marchés explose : +61% dès demain ! » Selectra, 9 juin 2025.
Potter, Brian. « Robot Dexterity Still Seems Hard ». Construction Physics, 3 mai 2024.
Robert Riener, Luca Rabezzana, et Yves Zimmermann. « Do robots outperform humans in human-centered domains? » Frontiers in Robotics and AI 10 (novembre 2023): 1223946.
RoboServices. « Trombinoscope RoboServices, édition mars 2025 ». LinkedIn. Consulté le 6 juin 2025.
Sanctuary AI. « Sanctuary AI Unveils PhoenixTM – A Humanoid General-Purpose Robot Designed for Work ». 16 mai 2025.
Alfred Sauvy, et anita Hirsch. La Machine et le chômage : le progrès technique et l’emploi. Collection Pluriel. Hachette, 1982.
Joseph Alois Schumpeter, Gaël Fain, et Jean-Claude Casanova. Capitalisme, socialisme et démocratie. Petite biblio Payot 1235. Payot & Rivages, 2023.
TED – Youtube. « Meet NEO, Your Robot Butler in Training | Bernt Børnich | ». avril 2025.
The Humanoid 100: Mapping thue Humanoid Robot Value Chain. Morgan Stanley, 2025.
Fred Truck, et Hans Moravec. « Mind Children: The Future of Robot and Human Intelligence ». Leonardo 24, n° 2 (1991): 242.
Why Today’s Humanoids Won’t Learn Dexterity – Rodney Brooks. 27 septembre 2025.
X (formerly Twitter). « Humanoid Botangelist sur X : “Maximizing Bot Productivity: Leveraging Break Schedules for Continuous Work Is a 16 or 22 hour bot Workday possible in the factory, just With a battery pack, and Without using umbilical cords, swappable battery packs, or induction charging? Yes. For the foreseeable future, the https://t.co/WaPVoDS3Vc” / X ». 30 janvier 2024.
Aucun commentaire.